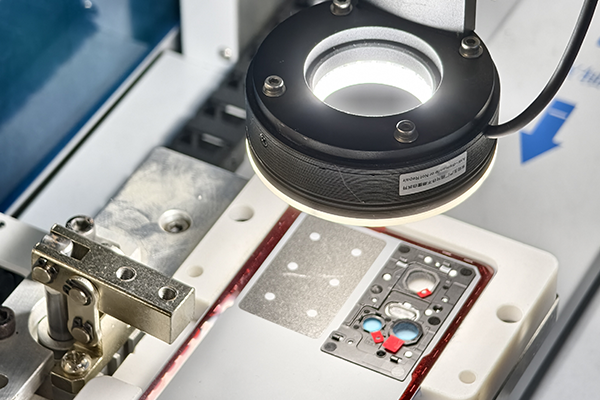
在 机器视觉 系统中,选择合适的光源及其控制器对于确保高质量图像捕获和处理至关重要。本文会提供一些建议,以便于引导您了解如何基于应用需求选择最合适的光源和光源控制器。 1. 理解光源的功率需求 不同类型的光源具有不同的功率需求,这直接影响到照明效果和系统的能效。例如: LED光源: 以其低功耗和高效率著称,适合长时间运行的应用,但在选择时需注意其最大亮度可能受到功率限制。 卤素灯: 虽然能提供高亮度和宽广的光谱输出,...
2024-03-20 14:48:23