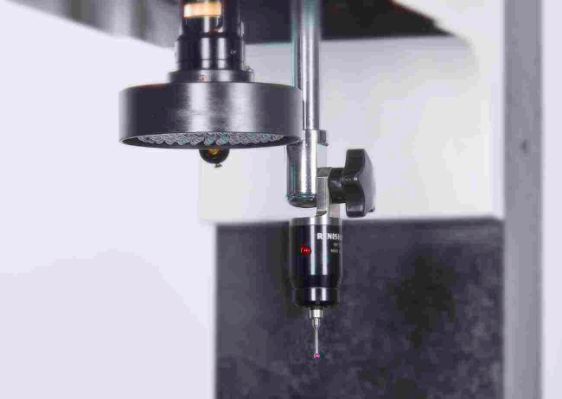
在现代工业领域,影像测量仪已经成为质量控制不可或缺的工具。而探针作为影像测量仪的关键组成部分,直接关系到测量结果的准确性和可靠性。 随着工业制造向高精度、高效率方向不断发展,探针技术也经历了长足的进步,呈现出多样化的类型和特性,以满足不同场景下的测量需求。 一、测量原理,光学与触觉的融合 影像测量仪的基本工作原理结合了非接触式光学测量和接触式物理探测两种技术路径。在光学测量方面,系统通过高解析度工业相机采集工件表面影像,结合自动变倍镜头...
2025-10-31 17:41:04