

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
影像几何对位方法为目前最常用的对位方法,原理是利用已知的靶标几何寻找对位的中心,藉由像素与实际单位的转换可找出实际坐标与影像坐标之间的转换,便可由影像误差计算出偏移量(Δx,Δy),由于大部分的图形为对称设计,因此常常需要多个靶标来进行角度(Δθ)的偏移计算,如图1所示
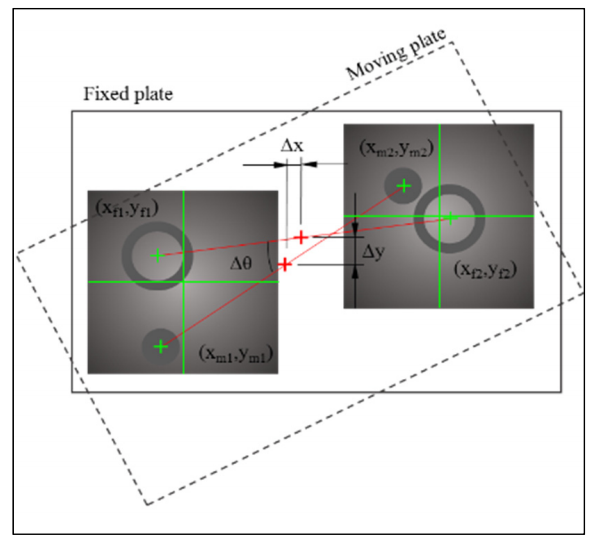
图1 影像几何对位原理图
其中(xf1,yf1)、(xf2,yf2)为固定平面的两个靶标点,而(xm1,ym1)、(xm2,ym2)为移动工件上两个预对位的对位靶标点。
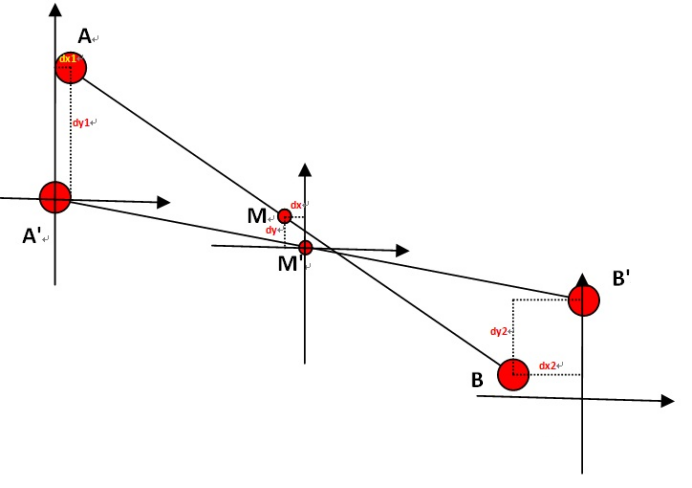
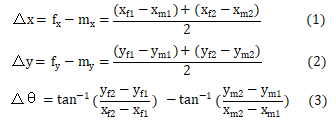
图2 剖析目标和对象对位原理
如图2所示,目标点位A和B,目标间的中点设为M;对象点为A'和B’,对象点的中点为M'。以对象间的中点M'为轴进行旋转,使对象A'B'和目标线AB平行的角度即为dθ。朝X方向和Y方向平行移动,在到达一致之前的距离为dx和dy。
两直线中点重合,完成居中对位,居中精度计算公式:Sqrt(dx*dx+dy*dy),dx1、dy1、dx2、dy2实现单个靶标中心误差管控。单个靶标精度计算公式:Max(dx1,dx2),Max(dy1,dy2)
图3 对位精度管控
对位计算完成,求出dx,dy,dθ进行判定,其中m_xyPrecision为设定的对位XY居中对位精度,m_anglePrecision为对位的角度管控精度。
(1)dx=(dx1+dx2)/ 2 ≤ m_xyPrecision [精度]
(2)dy=(dy1+dy2)/ 2 ≤ m_xyPrecision [精度]
(3)dθ ≤ m_anglePrecision
深圳市双翌光电科技有限公司是一家以机器视觉为技术核心,自主技术研究与应用拓展为导向的高科技企业。公司自成立以来不断创新,在智能自动化领域研发出视觉对位系统、机械手视觉定位、视觉检测、图像处理库等为核心的20多款自主知识产权产品。涉及自动贴合机、丝印机、曝光机、叠片机、贴片机、智能检测、智能镭射等众多行业领域。双翌视觉系统最高生产精度可达um级别,图像处理精准、速度快,将智能自动化制造行业的生产水平提升到一个更高的层次,改进了以往落后的生产流程,得到广大用户的认可与肯定。随着智能自动化生产的普及与发展,双翌将为广大生产行业带来更全面、更精细、更智能化的技术及服务。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
