

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
机器视觉点胶机就是将流体学、过程控制学、机器视觉技术以及计算机图形学综合运用在点胶机中,以提高点胶机的自动化、智能化水平。

1 机器视觉点胶机的三大应用
水晶滴胶应用
视觉型的点胶机会自动识别产品,并在系统内生成相应的记忆模型后利用三轴走位系统,将需要点胶的位置进行编程,设定好的程序便会使设备开始自动对产品进行滴胶,有效地解决了不干胶行业的苦恼。
人工智能检测应用
视觉点胶机可以对产品的不同之处进行视觉判定,所以每个产品在生产过程中的自动化程度得到大大提升,有利于缓解操作人员的作业压力。当视觉点胶机检测拍照自动识别到与原设定的物料模型不一致时,系统设置的报警程序将会提示操作人员,从而实现及时筛选出不良品,保证产品的质量。
上色上漆应用
一般视觉点胶机上色上漆与水晶滴胶应用类似,主要是将视觉型点胶机的阀改成滴油、并且考虑到产品形状不一样以及颜色种类比较多,视觉点胶机在做油漆的时候需要事先人工把油漆调试好。之后通过视觉点胶机的视觉系统成功实现对产品新装的识别,进行高速的点油漆上色作业。
2 点胶机运动控制与定位系统
点位运动控制
点胶机的点位控制主要包括上下料部分的执行,胶枪的快速移动和回原点,以及手动微调操作的设置。
在点胶机控制系统中,点位运动主要用于预备、辅助与进出目标点胶物料,为了提高生产效率。
轮廓轨迹控制
轮廓控制是能够对两个或两个以上的运动轴的位移和速度同时进行连续相关控制,使胶枪与工件间的相对运动符合点胶轨迹要求,在工件平面进行各种轨迹的点胶。
由于点胶轨迹的多样性,需要控制软件具备编辑轨迹的能力,或者导入相关图档,再在此基础上进行轨迹数据的提取能力。
图像识别定位
在点胶控制系统中引入图像,主要目的是为了定位工件,增加设备的柔性,减少甚至无需夹具的使用,少了系统中加入图像进行点胶后效果检测。
三种定位方法:
a.1点图像定位,示教图像学习一个Mark点模板,工作时候来料搜索该点,计算得到图像偏差,进而换算成点胶坐标数据来定位工件,该方法只能定位平移,不能得到旋转偏差。
b.2点图像定位,识别两个点,计算得到平移和旋转偏差。有时候,产品本身会有变形。
c.2点图像定位,更精确。

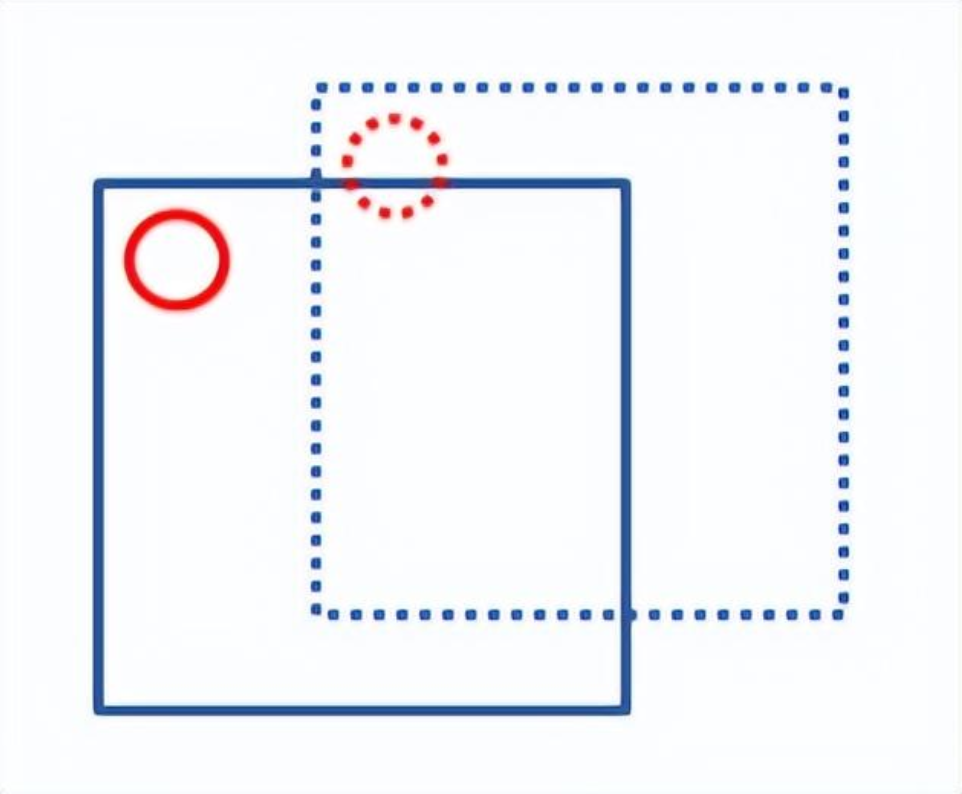
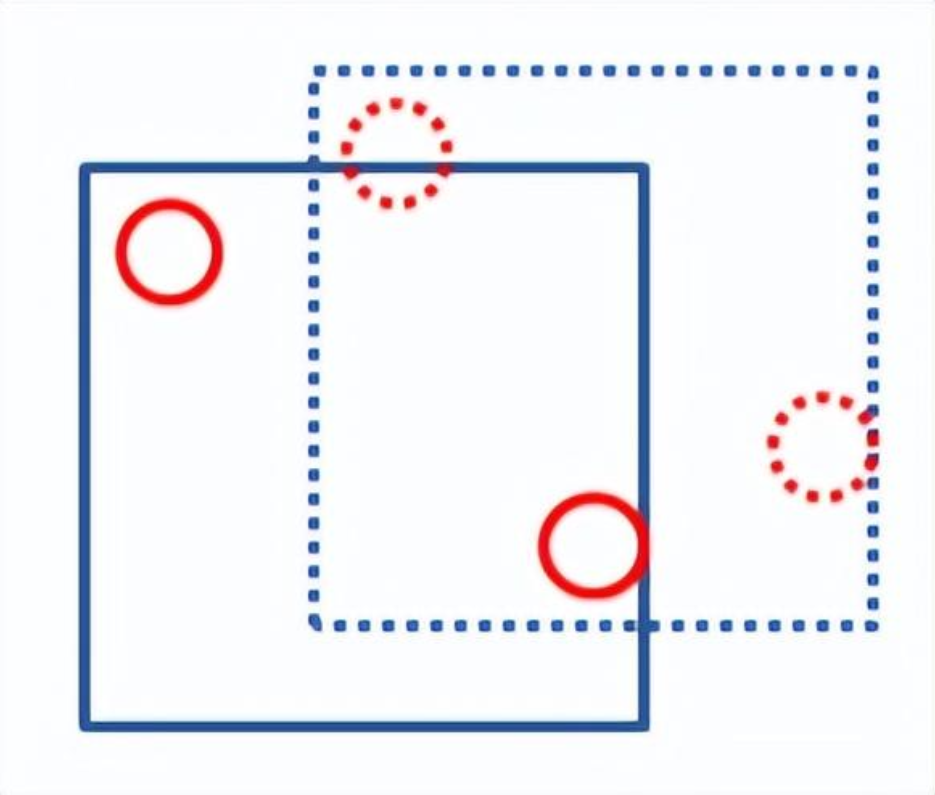
d.粗定位+精定位,如下图所示
3 视觉点胶应用系统
Mark点位置补偿
a.利用视觉算法对位Mark点补偿XY方向的误差;
b.支持单个Mark点、两个Mark点的扫描方式;
c.支持先全部产品扫Mark再点胶和设定数量产品扫Mark再点胶的模式;
d.可以实现主Mark和子板Mark共用,双重纠偏的效果。
运动中检测+ Bad Mark
产品为多组子产品的组合时,需要定位的Mark点数量会比较庞大,采用运动中检测,可以大大减少抓取时间;在检测过程中通过Bad Mark标记可以识别出人为标注过的不良产品,不进行点胶,从而提高效率与节省胶水。
实时高度检测补偿
a.利用激光测高补偿工件高度不同引起的误差;
b.支持单点探高,三点探高,逐条指令探高的方式;
c.可以覆盖不同材质,透明或者非透明产品的应用。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
