

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
视觉引导与定位是工业机器人应用领域中广泛存在的问题。对于工作在自动化生产线上的工业机器人来说,其完成最多的一类操作是”抓取——放置“动作,为了完成这类操作,对被操作物体定位信息的获取是必要的,首先机器人抓取必须知道物体被操作作前的位置,其次是必须知道物体被操作后的目标位置,以保证机器人准确地完成任务。
在大部分地工业机器人应用场合中,机器人只是按照固定地程序进行操作的,物体是初始位置和终止位置是事先规定好的,为了高质量的作业,就要求生产线相对固定,定位精度高,这样的结果是生产柔性下降,成本就大大增加,此时生产线的柔性和产品质量是矛盾的。
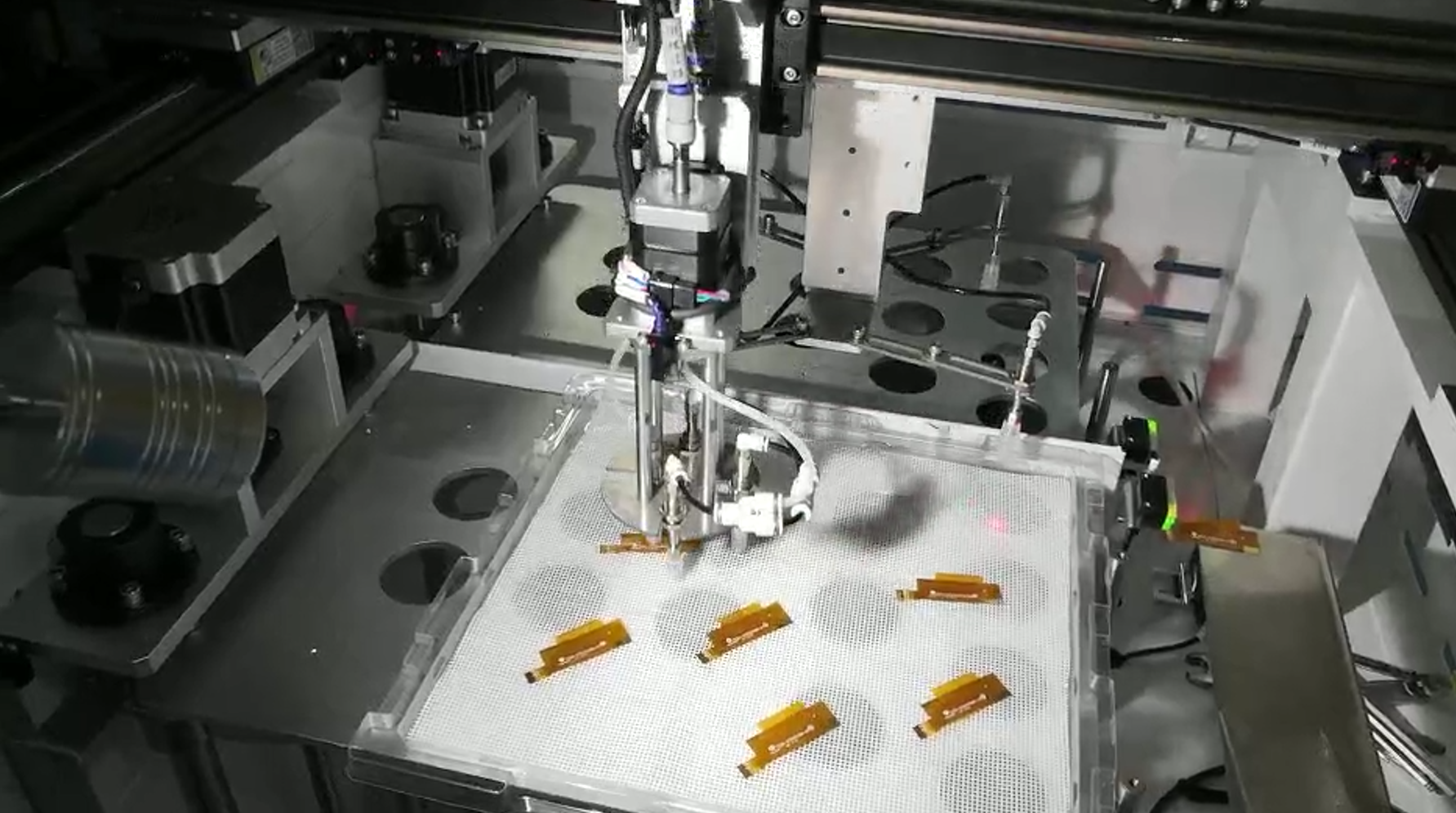
在机械手应用的项目中,最核心的是视觉引导定位系统,主要包括动态跟总定位、精准定位装配、精准位置调整等技术,随着经济发展与人民生活水平的提高,物流行业有了长足的发展并产生了迫切的自动化应用需求。包裹分拣是提高物流效率的重要环节,该项目利用MicroPos机械手视觉定位算法引导Delta蜘蛛机械手跟踪抓取流水线上的邮件、纸箱及包裹等物品。

通过手眼标定算法实现相机和机械手坐标系统一。生产过程中,通过传感器、测高仪等辅助外设,相机给出机械手坐标系下产品位置坐标以及产品高度信息,引导机械手准确跟踪抓取产品。
MicroPos是双翌光电自主研发地机械手视觉定位算法。
MicroPos的主要特点:
1.支持相机安装机械手
2.大视野标定法
3.小视野标定法
4.支持多种通讯方式
双翌视觉引导机械手定位抓取可以做到:
1. 高度高精度
2. 傻瓜式操作
3. 简易标定系统
4. 控制四轴机械手
5. 丰富图像处理自主化对位算法
6. 提升产能节省人工
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
