热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


对位目标不固定,通过非对位平台上的目标相机获取坐标,通过映射关系转换到平台上相机中,再计算出对象和目标位置偏差,使对准目标位置。
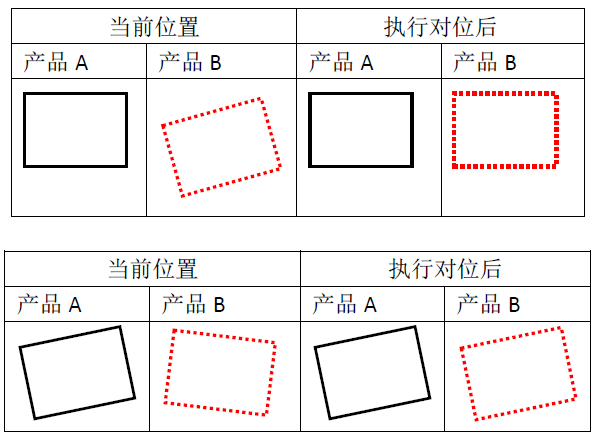
说明:平台端和非平台端来料位置都不固定,但是Mark与产品的相对位置固定。平台端和非平台端各有一个相机,拍照并找两张照片中Mark的角度坐标差作为偏移量,根据偏移量和两相机之间的映射关系,将平台端的产品贴到非平台端上。
应用场景:小尺寸产品或精度要求不高的产品
适用产品:如fpc与钢片的贴合
适用尺寸:小尺寸
精度:±0.05mm
该模型下常见的Mark标志方法如下(同单目双Mark自对位):
说明:平台端和非平台端来料位置都不固定,但是Mark与产品的相对位置固定。确保两个Mark都在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量和两端相机的映射关系将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,纠偏方法同单目双Mark自对位,区别在于单目双Mark自对位是将平台端产品贴合到基准位,单目四Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:相同环境下单目四Mark映射对位比单目双Mark映射对位精度高
适用尺寸:小尺寸
精度:通常±0.05mm

该模型下常见的Mark标志方法如下(同单目三Mark自对位):
说明:平台端与非平台端的产品来料位置不固定,但是Mark与产品的相对位置固定。三个Mark对应产品的两个交点和一个特征点。拍摄时确保所有Mark点在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,纠偏方法同单目三Mark自对位,区别在于单目三Mark自对位是将平台端产品贴合到基准位,单目六Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:该模型并不常用,属于比较特殊的应用模型,但是相同环境下精度比单目单/双Mark更高
适用产品:客户要求使用这种定位方式时
适用尺寸:小尺寸
精度:±0.05mm
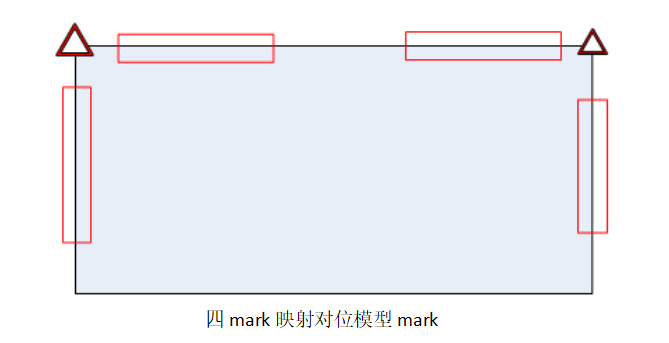
该模型下常见的Mark标志方法如下(同单目四Mark自对位):
说明:平台端和非平台端来料位置都不固定,但Mark与产品的相对位置固定。四个Mark对应矩形产品的四个角点。拍摄时确保四个Mark都在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量和两端相机的映射关系将平台端的产品贴到非平台端上。

纠偏方法:如上图所示,纠偏方法同单目四Mark自对位,区别在于单目四Mark自对位是将平台端产品贴合到基准位,单目八Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:增加了抓取Mark通道,使得对位精度更高,对产品的居中效果更加明显
适用产品:客户要求精度较高时
适用尺寸:800x600mm(完成项目)
精度:±0.05mm
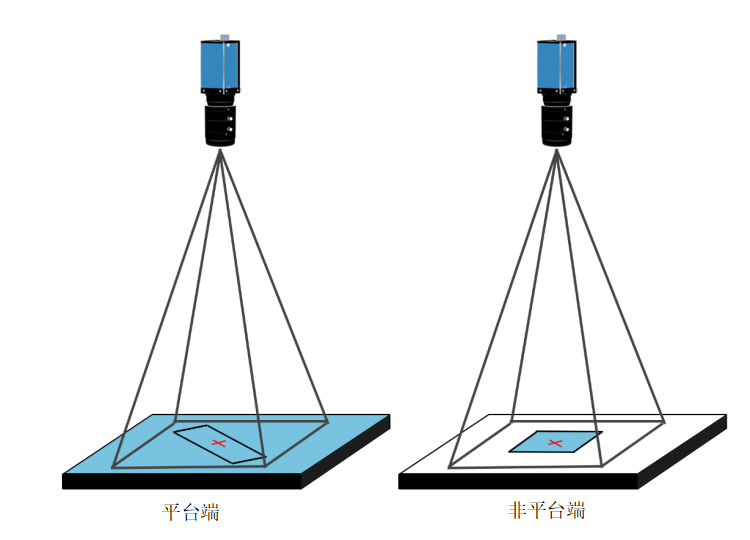
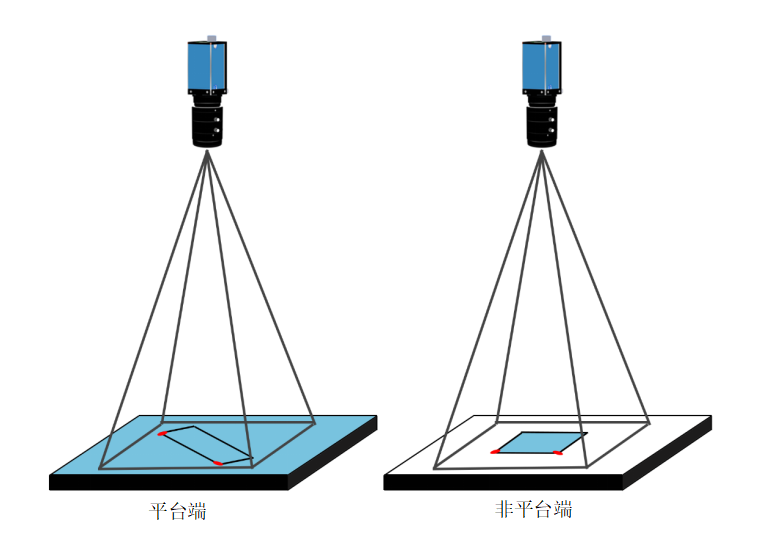
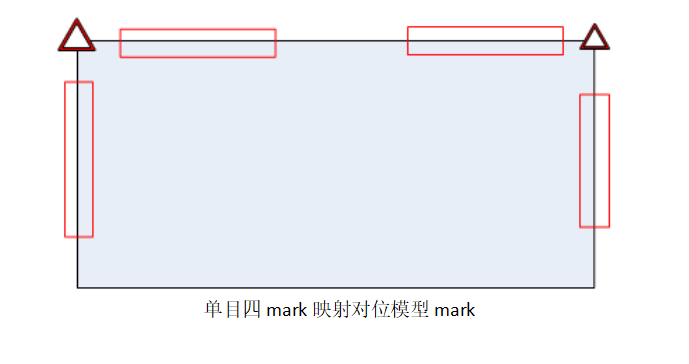
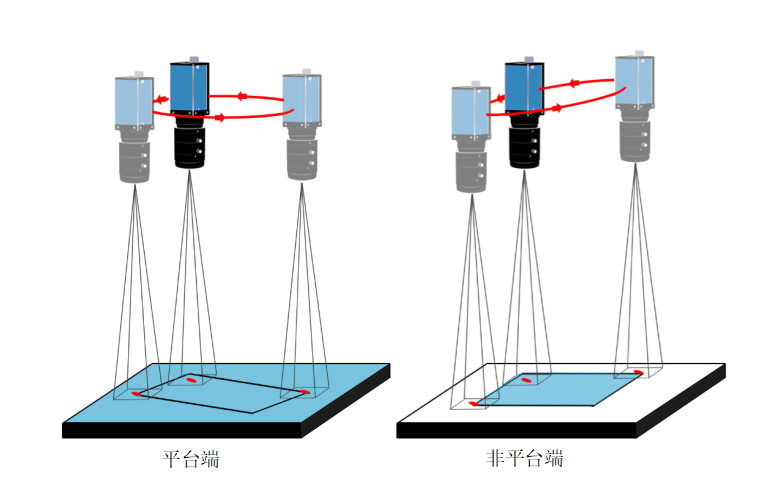
四mark映射对位模型(1)---单相机模型,如下图:
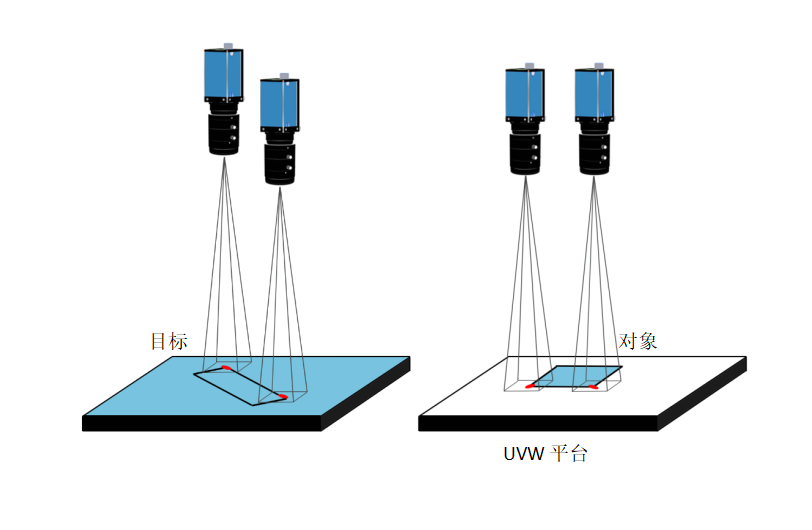
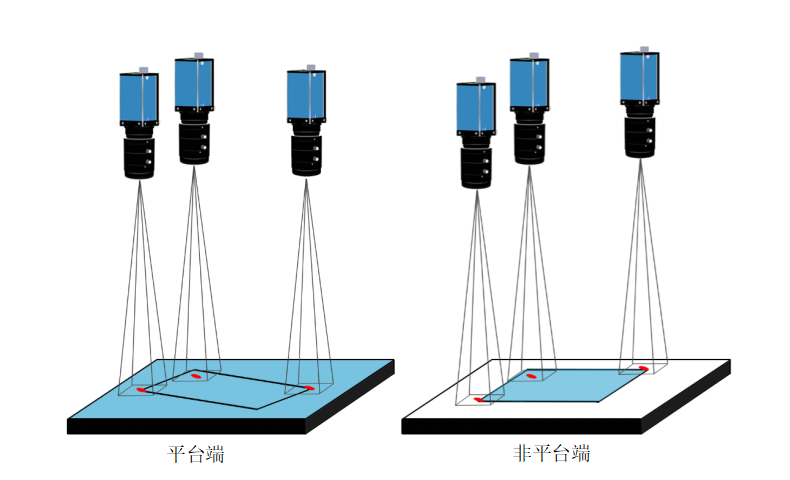
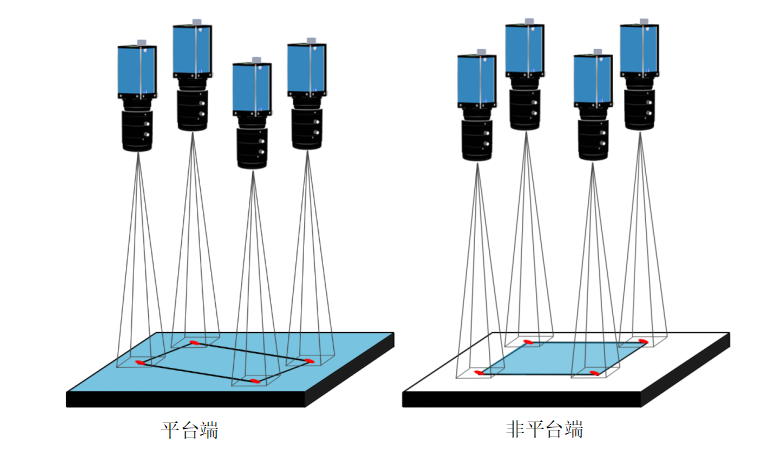
四mark映射对位模型(2)---双相机模型,如下图:
该模型下常见的Mark标志方法如下(同双Mark自对位):
说明:四Mark映射对位有单相机和双相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,双相机模型两个相机分别拍摄两个交点。非平台端与平台端拍摄方式相同。得到Mark点后。根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
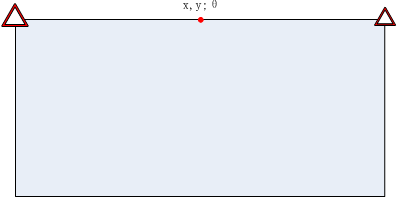
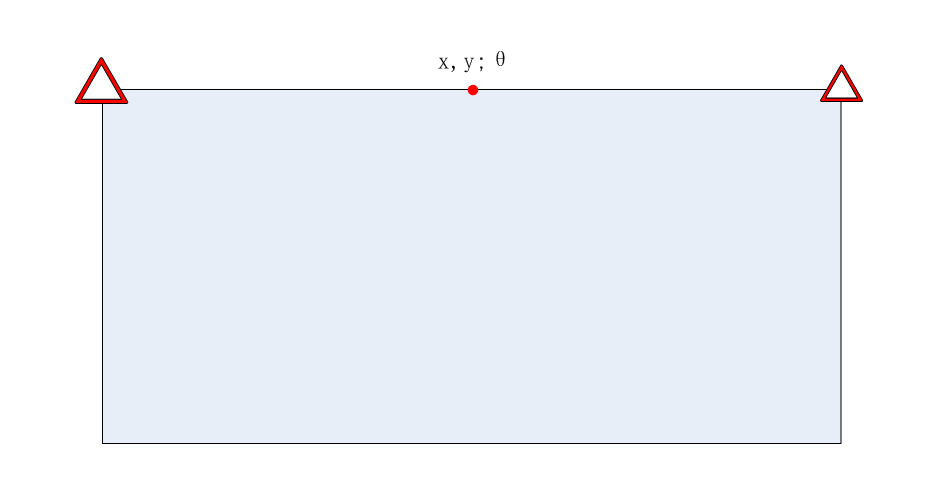
纠偏方法:如上图所示,纠偏方法同双Mark自对位,一般使用长边中点作为(x,y),长边角度作为θ。区别在于双Mark自对位只有平台端有相机,通过平台端的拍摄的Mark点和基准Mark点对比;四Mark映射对位的平台端和非平台端都有相机,通过平台端拍摄的Mark点和非平台端拍摄的Mark点对比。
应用场景:弥补单目双Mark映射对位在较大尺寸产品时精度不够的问题,相对单目双Mark映射对位精度更高
适用产品:较大产品
适用尺寸:100~200mm
精度:±0.05mm
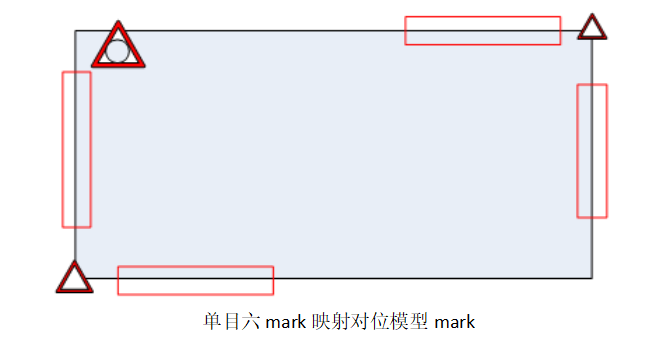
六mark映射对位模型(1)---单相机模型,如下图:
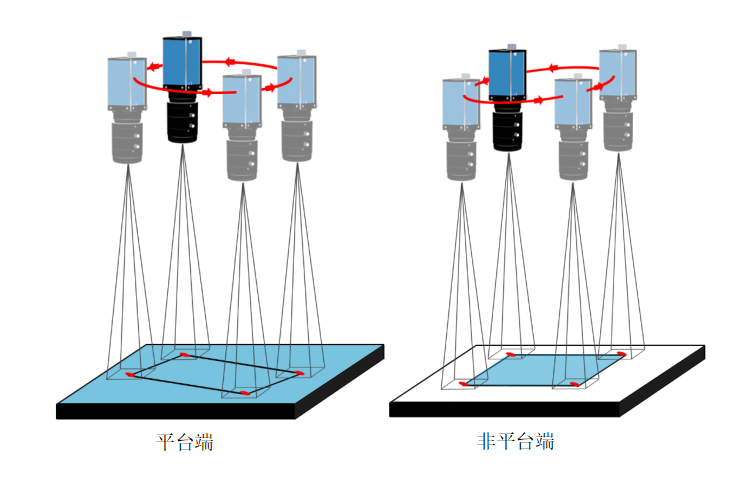
六mark映射对位模型(2)---三相机模型,如下图:
该模型下常见的Mark标志方法如下(同三Mark自对位模型):
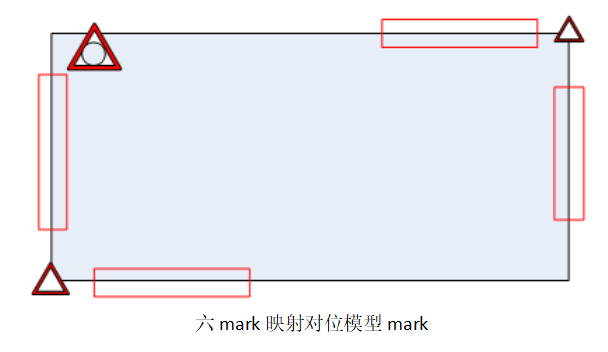
说明:六Mark映射对位有单相机和三相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,三相机模型三个相机分别拍摄三个Mark点。非平台端与平台端拍摄方式相同。得到Mark点后,根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
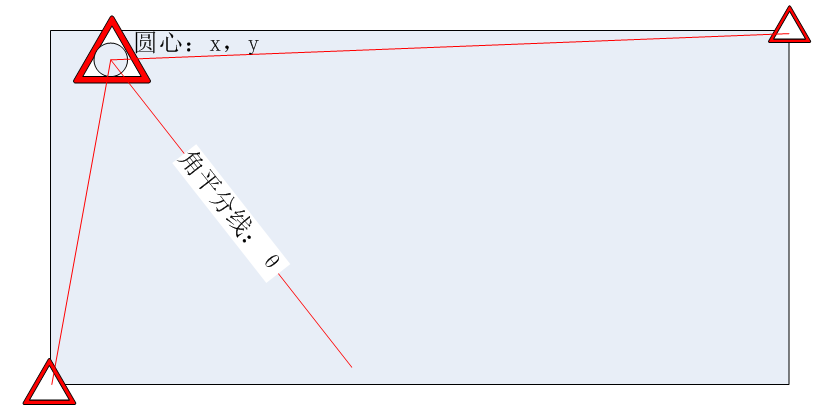
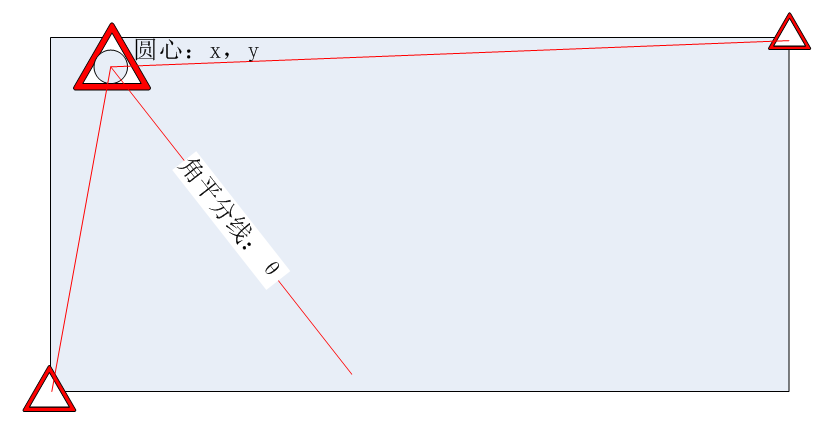
纠偏方法:如上图所示,纠偏方法同三Mark自对位。
应用场景:该模型并不常用,属于比较特殊的应用模型,但是相同环境下精度比单目单/双Mark更高
适用产品:较大产品
适用尺寸:>200mm
精度:±0.05mm
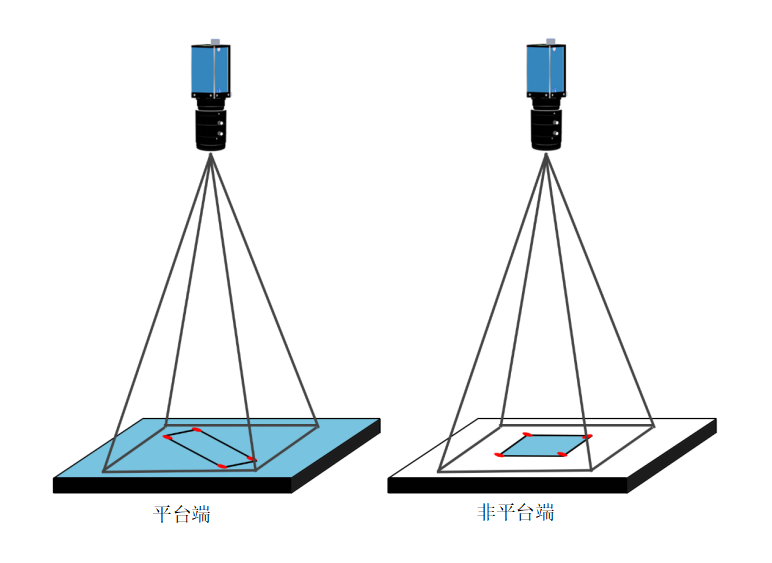
八mark映射对位模型(1)---单相机模型,如下图:
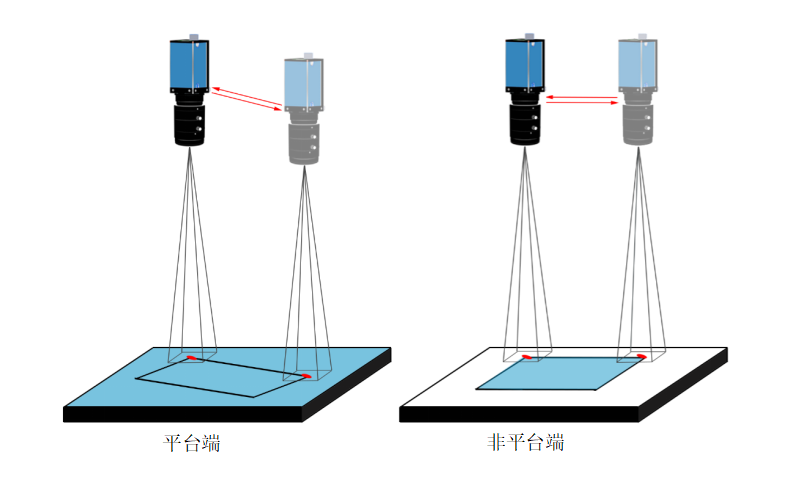
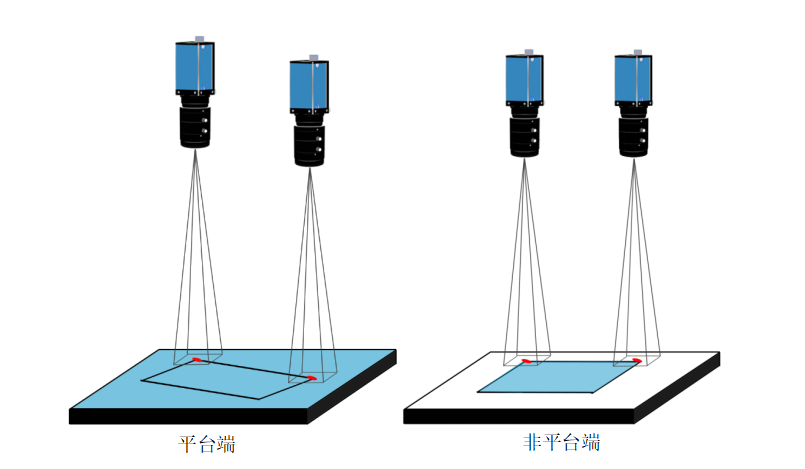
八mark映射对位模型(2)---四相机模型,如下图:
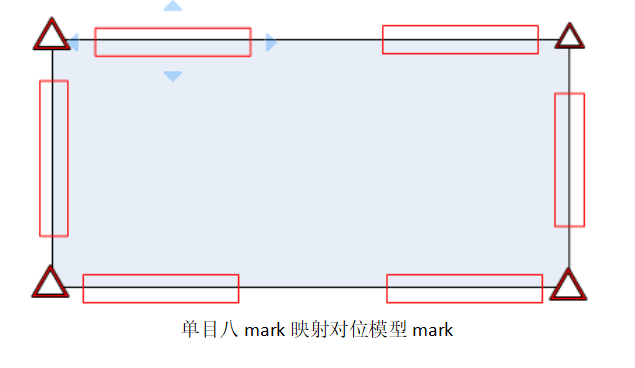
该模型下常见的Mark标志方法如下(同单目四Mark):
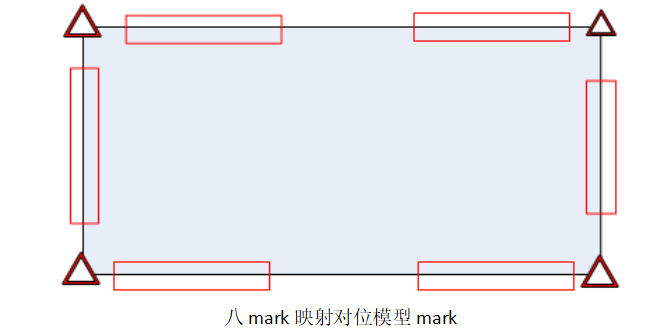
说明:八Mark映射对位有单相机和四相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,四相机模型的四个相机分别拍摄四个交点。非平台端和平台端拍摄方法相同。找出两端的Mark点后,根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
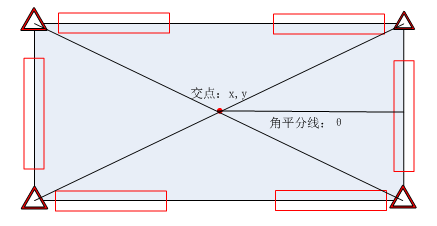
纠偏方法:如上图所示,纠偏方法同四Mark自对位。
应用场景:用于解决产品尺寸较大,精度不够的问题。八Mark映射对位精度相比六Mark和四Mark更高
适用产品:较大尺寸产品
适用尺寸:>200mm
精度:±0.05mm
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
