热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


1.一般地,相机像素坐标系符合下图的关系:
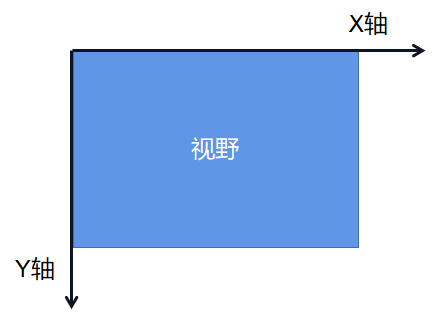
即Y轴的正方向为X轴正方向的右旋转90度方位,我们的算法是基于这种标准的视觉坐标系的。
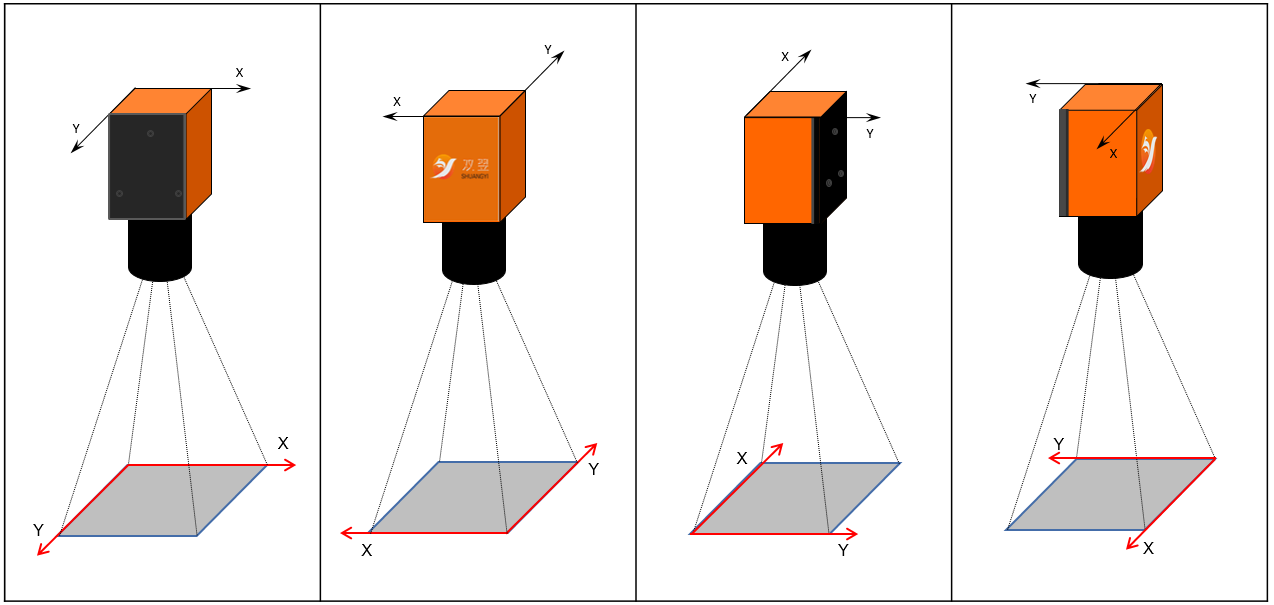
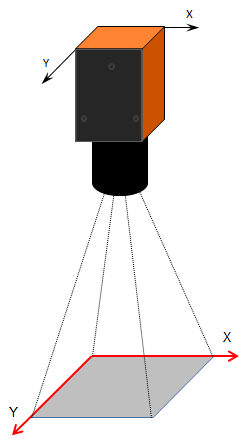
2.实际安装中,相机的方向不同,相机的坐标系也不同。以操作台站立的位置为基准,相机自上往下拍时,相机的坐标系如下:
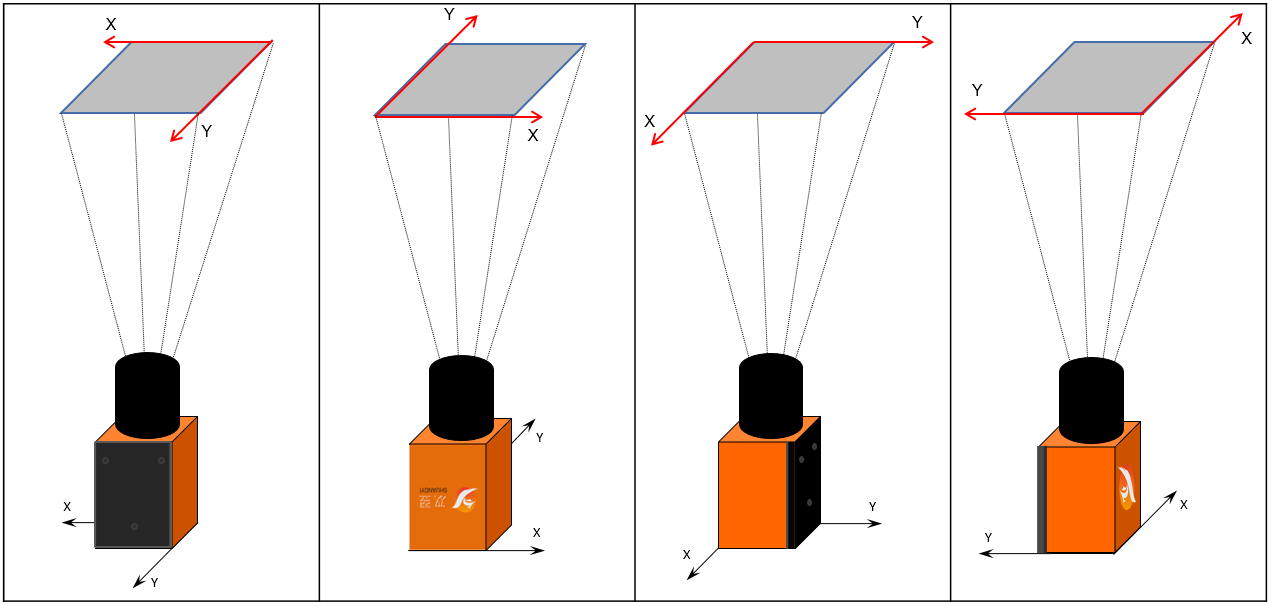
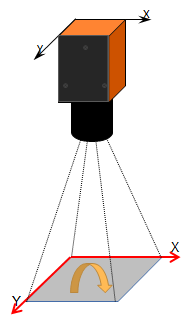
3.以操作台站立的位置为基准,相机自下往上拍时,相机的坐标系如下:
4.相机方向与显示器的关系
标准显示器的画面坐标系如下:
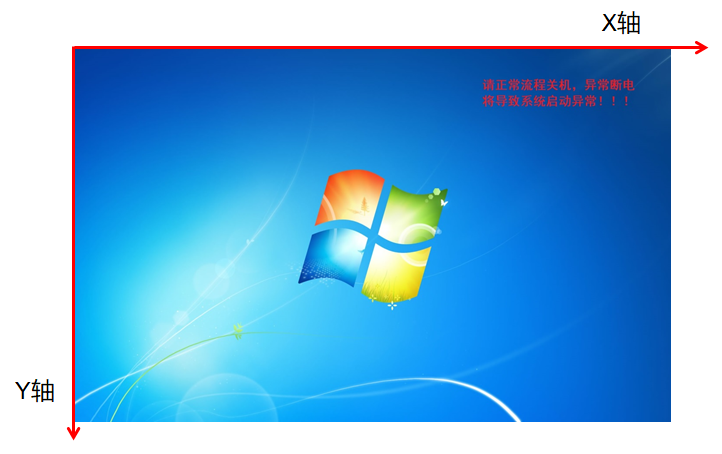
相机安装方向在满足实际视野长宽需求的前提下,一般要求符合显示器的界面坐标,所以相机优先如右图安装,或者其他方向通过镜像调整到和显示器一致的坐标系,以符合操作习惯。
二、对位平台与相机的关系
我们的对位算法是基于相机与对位平台同轴同向的基准计算位置坐标的,对于非同轴同向的坐标系统,需要告知我们平台与相机的方向关系。我们用b_CW和b_Y两个参数来描述平台与相机的方向关系。
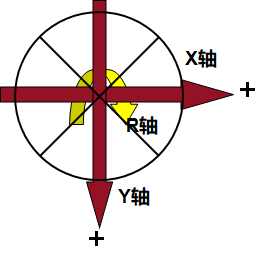
在相机视野中(相机坐标系是常规的向右X+,向下Y+),当R方向正脉冲指令旋转时,顺时针为true,否则为false!
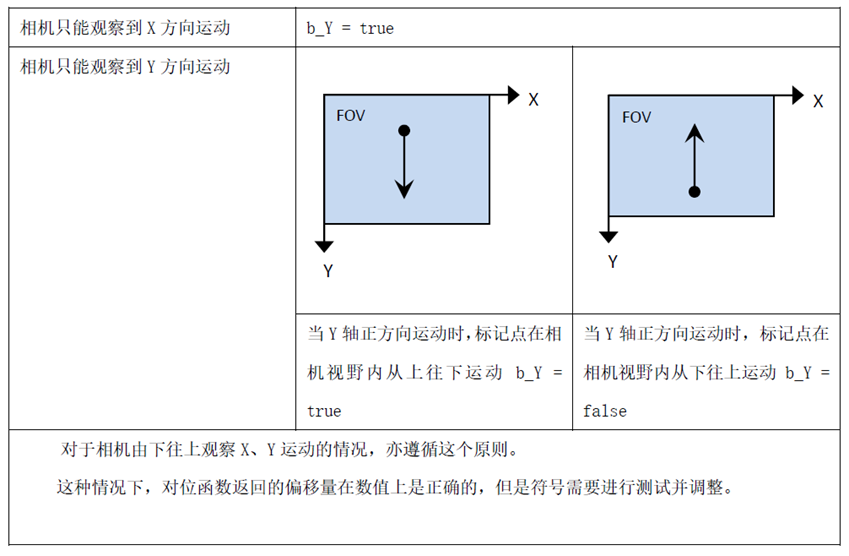
Y轴和相机Y方向的关系:运动Y轴正方向在运动X轴正方向的顺时针90度处,为true, 否则为false!
1.b_CW的判定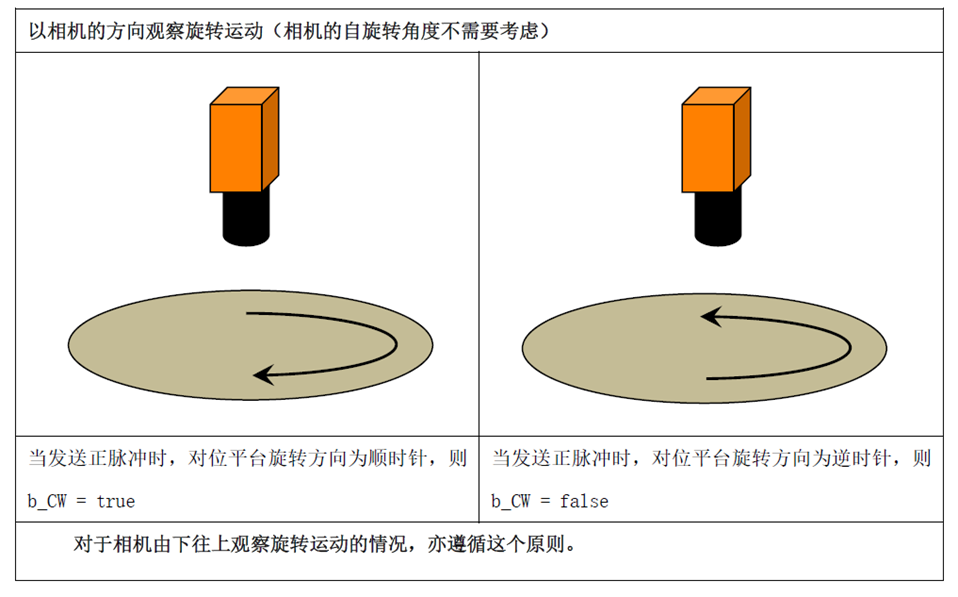
2.b_Y的判定
a.以相机的方向观察平台X、Y运动(相机的自旋转角度不需要考虑),相机能同时观察X、Y方向的运动情况(标准模型)。
运动Y轴正方向在运动X轴正方向的顺时针90度处,为true,否则为false!
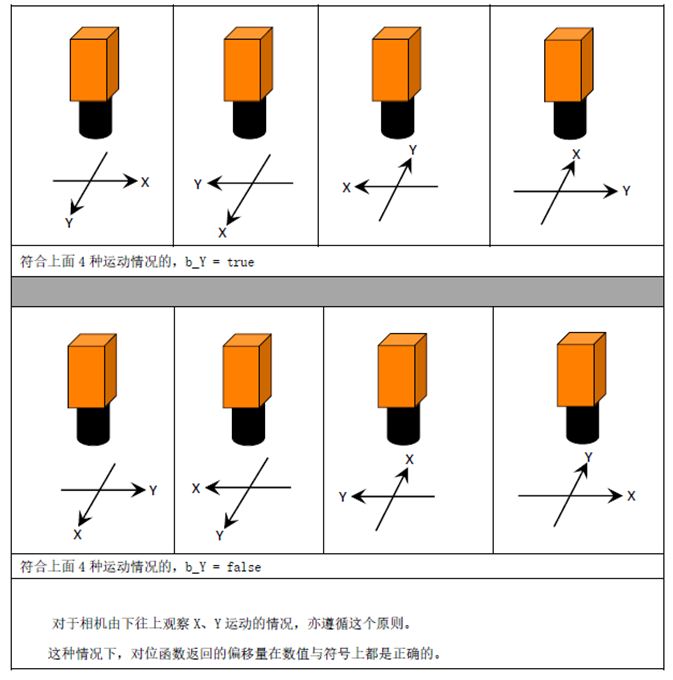
b.对于分离式的运动平台,相机只能观察到 X 或 Y 的运动情况(不需要考虑相机的自旋转角度),则按右侧原则设置:
三、平台类型
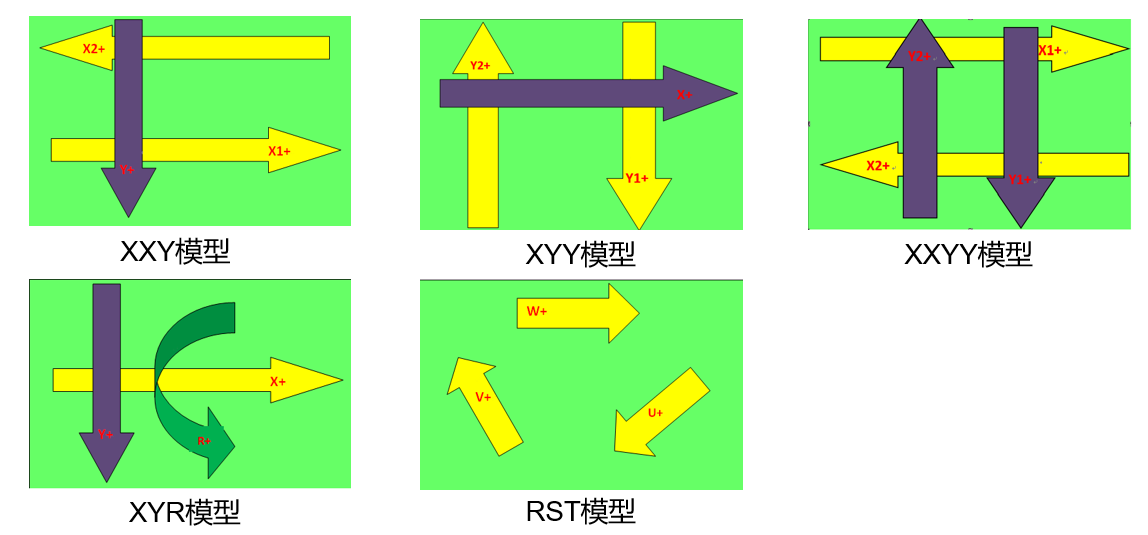
包含对位平台、SCARA机械手、独立搭建的XYR模组、分离式XYR模组综合来看,我们归纳为以下几种模型:
XYY模型、XXY模型、XXYY模型、XYR模型、RST模型
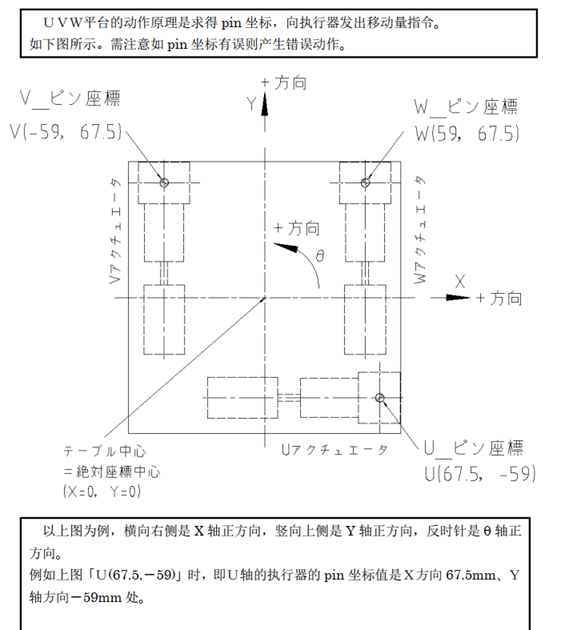
1.UVW平台
UVW平台的三轴结构与方向搭配多样,为了方便控制UVW平台,我们将UVW平台定义为XXY型平台和XYY型平台,且规定三轴的正方向同顺时针指向或者同逆时针指向。

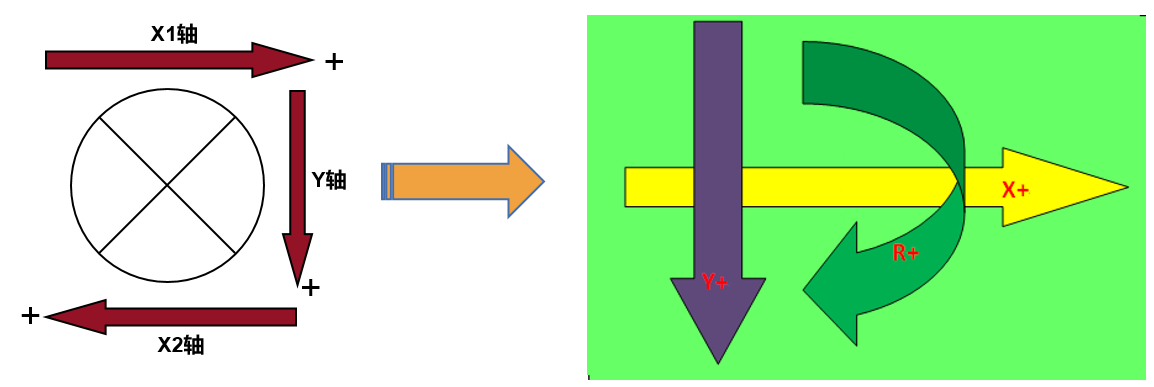
2.XXYY平台
同样地,对于四轴的 XXYY平台,我们规定四轴的正方向为使得平台顺时针方向旋转的方向,如下图所示:
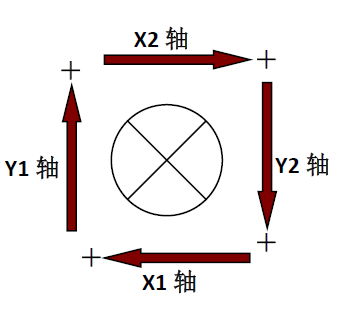
四轴的同方向运动使平台能作顺时针或逆时针旋转运动。
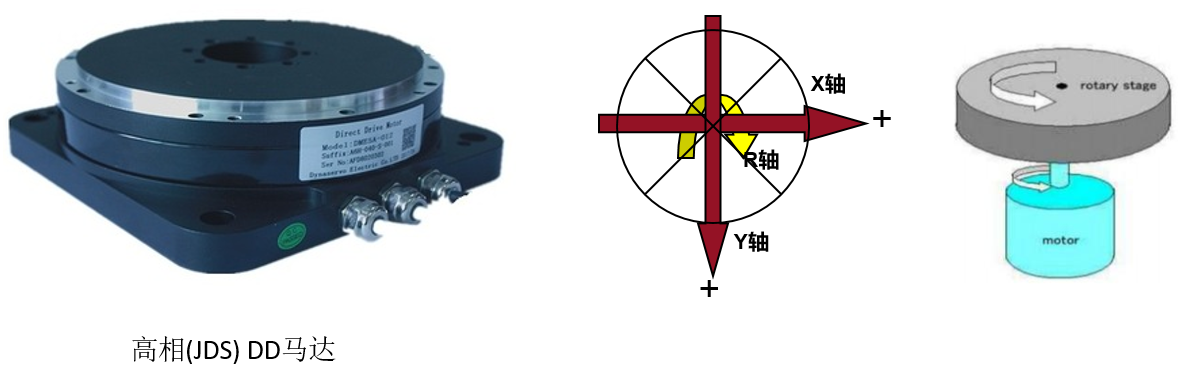
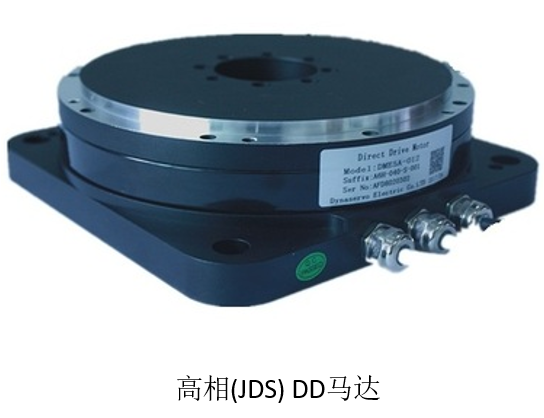
3.Xyθ平台(R轴为DD马达)XY轴为常规模组,旋转轴为DD马达直驱带动平台旋转。
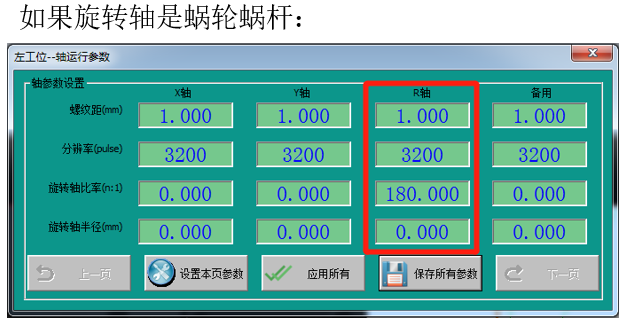
4.Xyθ平台(R轴为蜗轮蜗杆方式)
XY轴为常规模组,旋转轴为蜗轮蜗杆方式带动平台旋转。
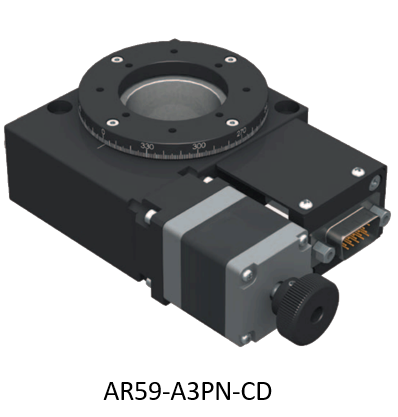

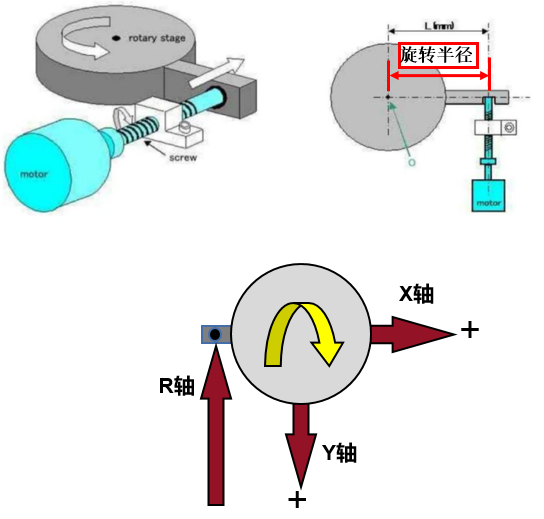
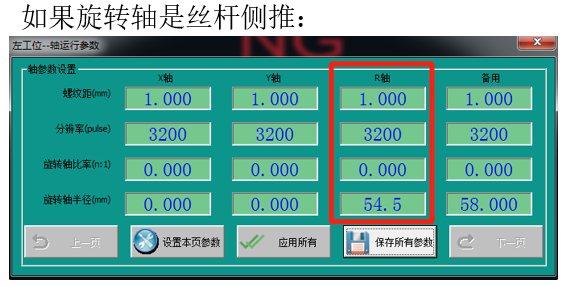
5.Xyθ平台(R轴为丝杆侧推方式)
XY轴为常规模组,旋转轴为丝杆侧推方式带动平台旋转。
6.XYR模组(独立搭建的XYR模组)
XYR三轴都为模组电机搭建而成,构成XYR机械手。

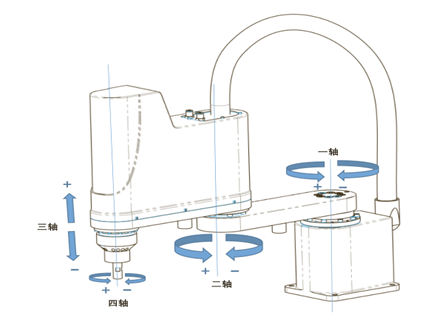
7.SCARA机械手
标准的水平关节机械手,其结构模型虽然不是XY轴正交加旋转轴的模型,但是其标准的直角坐标系是符合XYR的正交模型,水平3轴联动是可以按照直角坐标系运动的。

四、平台的控制
对于运动平台,如果我们需要控制XY方向的移动,我们就需要了解平台XY丝杆的螺纹距和驱动器的细分。如果我们需要控制平台旋转,除了以上两个信息我们还需要了解平台的半径,平台的结构类型。
按照前面讲到的平台类型,我们总结如下:

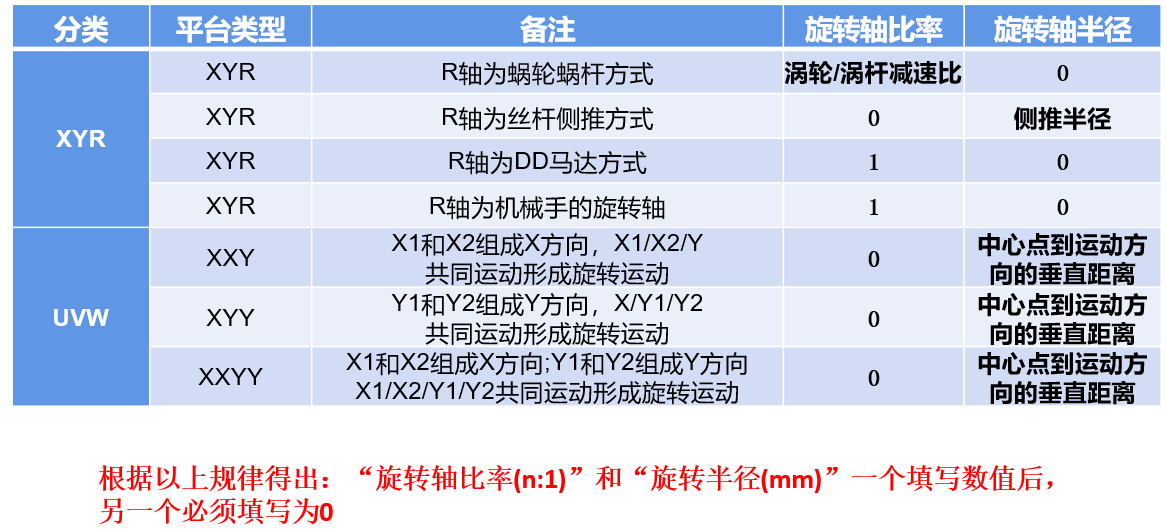
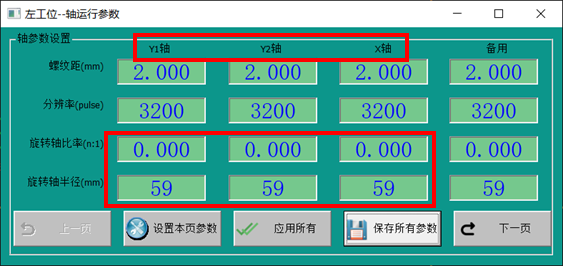
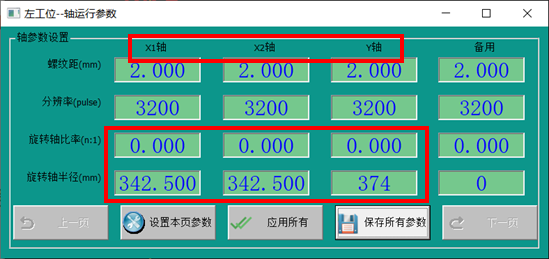
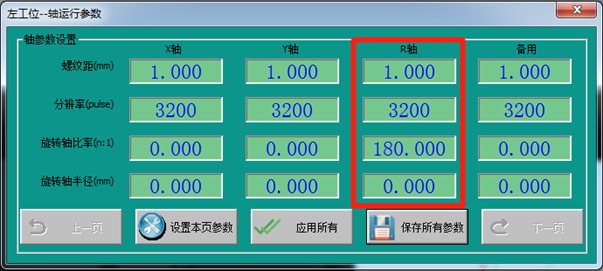
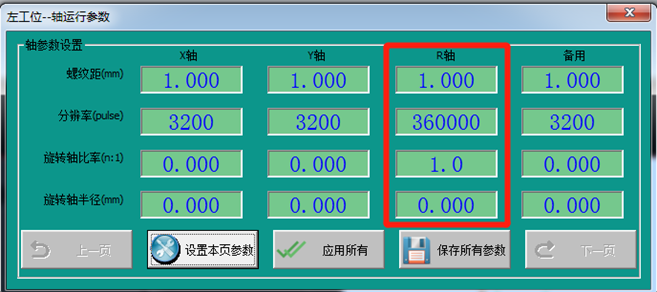
MasterAlign-控平台和MasterAlign-通讯软件中用于描述平台类型和平台半径的是:
旋转轴比率和旋转轴半径两个参数。
总结几种对位平台的旋转轴比率和半径如下:
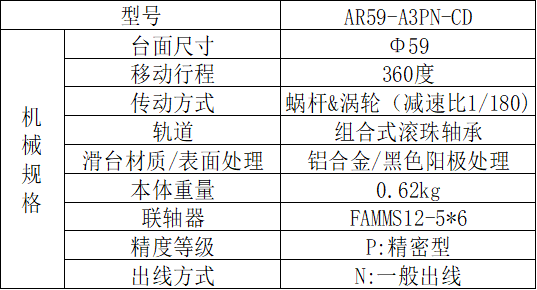
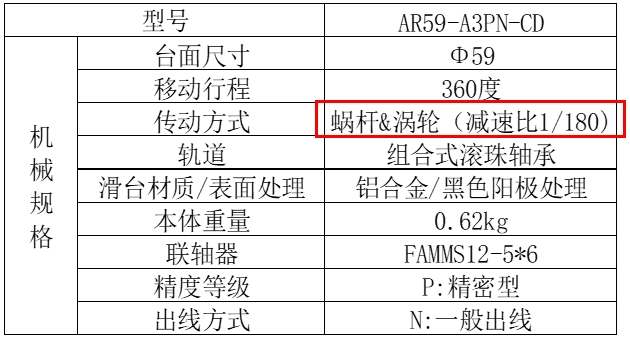
我们选用的旋转平台为AR59-A3PN-CD,其蜗杆/涡轮减速比为1/180,表示蜗杆转1圈,涡轮转1/180圈。如我们选用的电机分辨率为3200Pulse/Rev,那么涡轮转动一圈需要180*3200Pulse=576000Pulse/Rev。该旋转机构角度分辨率则为360度/576000=0.000625度/脉冲
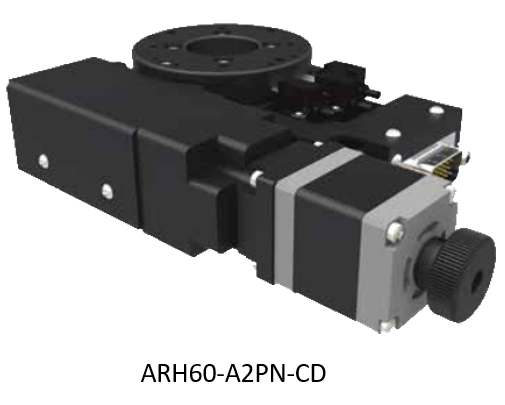
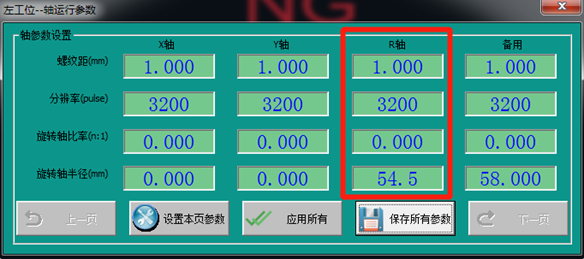
2.旋转轴为丝杆侧推方式
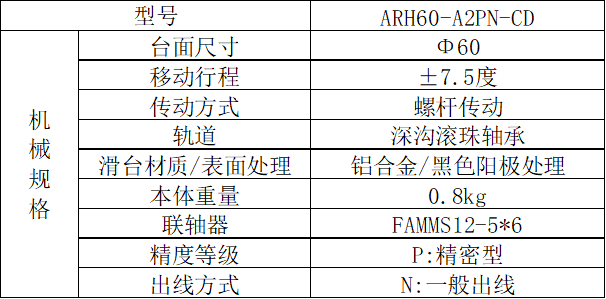
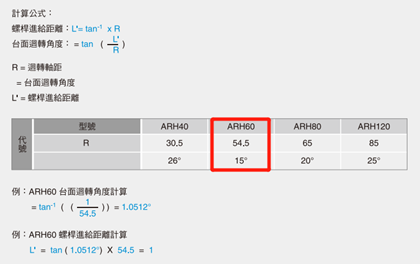
我们选用的旋转平台为ARH60-A2PN-CD,其丝杆螺距为1mm,如我们选用的电机分辨率为3200Pulse/Rev,平台的侧推半径为54.5mm,旋转轴比率为0。则旋转角度为: θ=tan(L/R)侧推电机旋转一圈,平台角度摆动:θ=tan(1mm/(54.5mm))=1.0512°

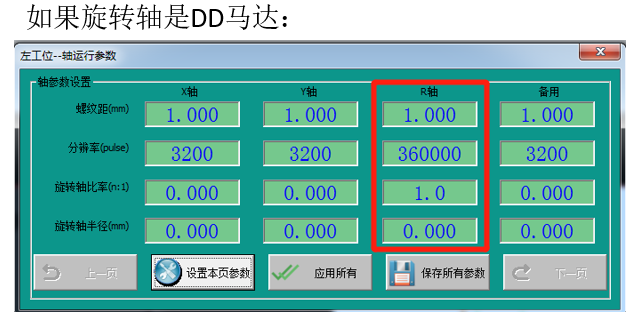
3.旋转轴为DD马达方式
如果我们选用的旋转平台为DD马达,马达分辨率为360000Pulse/Rev,那么DD马达角度分辨率则为360度/360000=0.001度/脉冲
4.XXY/XYY/XXYY对位平台
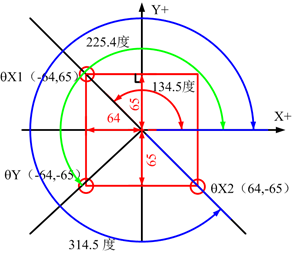
XXY平台的X方向运动,由X1和X2轴同时运动相同距离形成,Y方向运动由Y轴独立运动形成,旋转运动由3轴同时正向或者负向运动相等距离形成;
XYY平台的Y方向运动,由Y1和Y2轴同时运动相同距离形成,X方向运动由X轴独立运动形成,旋转运动由3轴同时正向或者负向运动相等距离形成;
XXYY平台的X方向运动,由X1和X2轴同时运动相同距离形成,Y方向运动由Y1和Y2轴同时运动相同距离形成,旋转运动由4轴同时正向或者负向运动相等距离形成,鉴于4轴平台控制要求的难度,也有松掉其中一个轴的使能当作UVW平台控制,运动完成后再激磁。
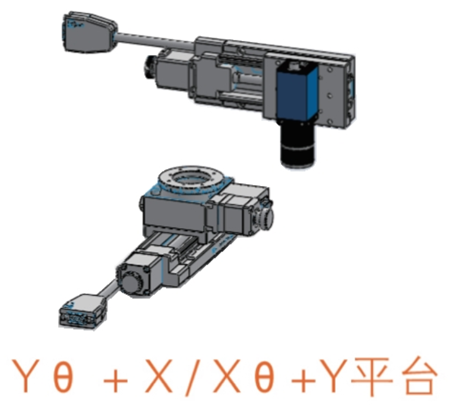
5.XR+Y和YR+X分离结构
XR+Y和YR+X分离结构式的平台控制与XYR平台一致,由于结构分离,在执行样本纠偏的时候,可能会存在样本的交接,需要注意的是平台是否能够完成视觉的多次对位和复检。
无论什么类型的运动平台,最终都会转换成XYR模型进行控制,一般要求设置成与相机同轴同向(包括相机上照和相机下照),我们在此基础上分析相机与平台的关系:b_CW、b_Y。
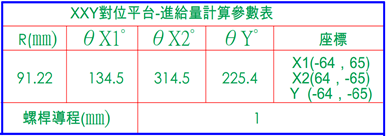
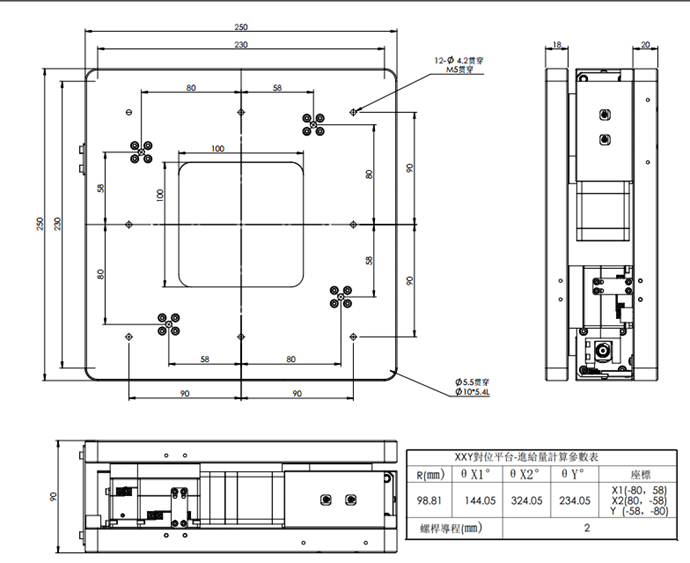
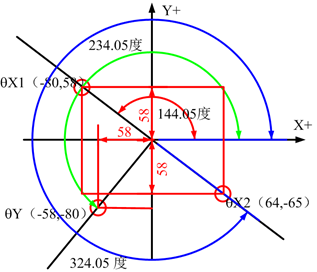
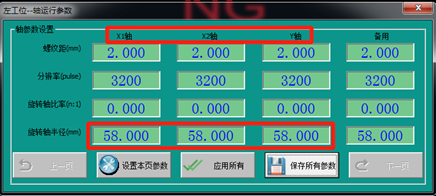
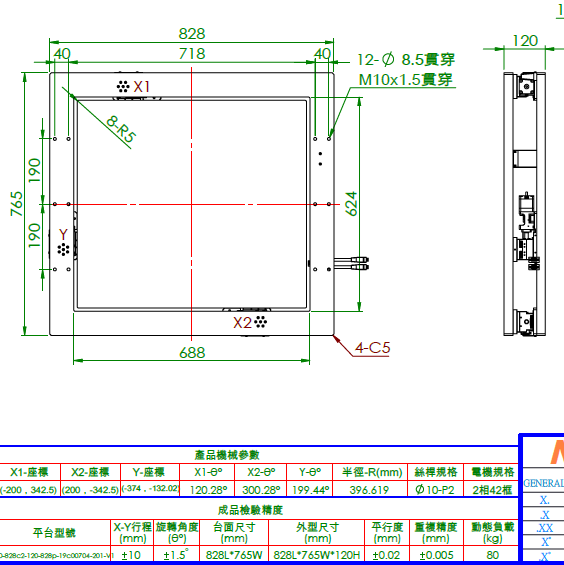
五、平台参数范例
1.平台参数范例-1
2.平台参数范例-2
3.平台参数范例-3
4.平台参数范例-4
5.平台参数范例-5

6.平台参数范例-6
7.平台参数范例-7
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
