热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


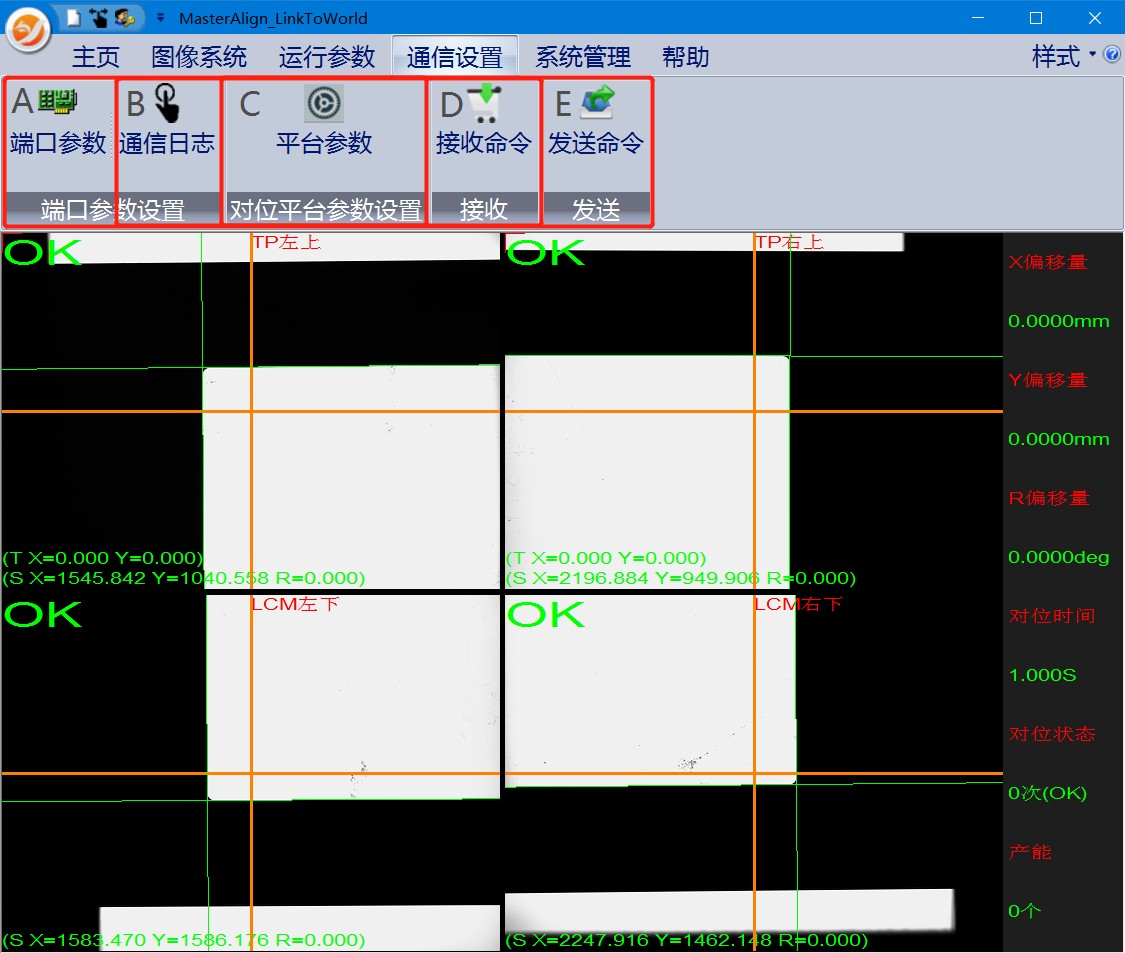
A. 端口参数:设置通讯端口相关参数,测试通讯协议。
B. 通讯日志:记录通讯收发数据记录
C. 平台参数:设置对位平台相关参数
D. 接收命令:接收命令界面相关参数操作和查阅
E. 发送命令:发送命令界面相关参数操作和查阅
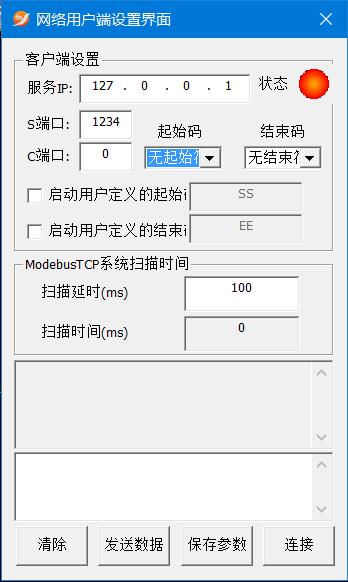
用户端设置界面
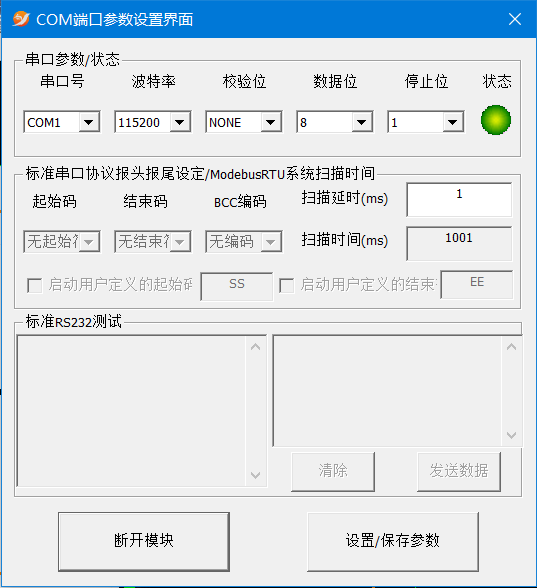
在“通信设置”->点击“端口参数”,弹出端口参数设置界面。
针对不同的通讯方式,设置不同,这部分一般由供应商来设置。其中扫描时间代表通讯的周期时间。
通讯的方式以及资料保存文档都在软件的根目录下“SYCommunicateFile” 文件夹中,如果文件夹内没有文档,则打开运行软件会提示选择通讯方式,如下图所示:
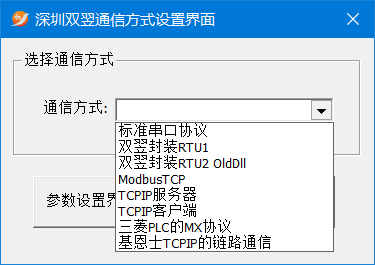
如上图图所示,系统集成了多种通讯方式,大大方便了客户的选择使用。
在软件的根目录下“SYCommunicateFile”中生成的通讯文档,如下图所示:(注释:文档名称标准格式为 XX_00.SYCommunicateFile,如下图 A 文档符合名称定义,因此系统加载此通信方式)
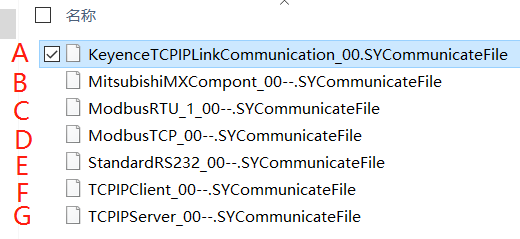
A. 基恩士 TCPIP 的链路通讯端口设置界面:
B. TCP/IP 服务器(视觉优先考虑做服务器)通讯端口设置界面:
C. Modbus RTU (串口)(视觉做主站)通讯端口设置界面:
D. TCP/IP 用户端通讯端口设置界面:
E. 三菱 PLC 的 MX (目前支持 32 位,不支持 64 位系统)通讯端口设置界面:
(三菱通讯设置方法详见“三菱 MX 控件安装以及设置方法”文件)
F. Modbus TCP (网口)通讯端口设置界面:
G. 标准串口协议通讯端口设置界面:





通信信息记录界面
在“通信设置”->点击“通信日志”,弹出通信日志显示界面,如图所示:
在“通信设置”->点击“平台参数”,弹出平台参数设置界面,如图所示:
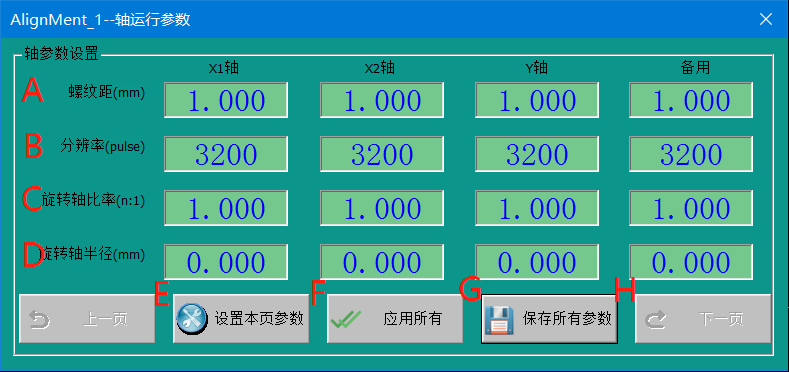
A. 螺纹距:每个轴对应丝杆的螺纹距,即丝杆旋转一圈前进的距离;
B. 分辨率:每个轴对应驱动器的分辨率,即旋转一圈需要的脉冲数量;
C. 旋转轴比率:每个轴对应的减速机比率,例如加了 1:10 的减速机,那边这个值就设置为 10,这样代表电机转一圈的脉冲是 10 倍的分辨率;
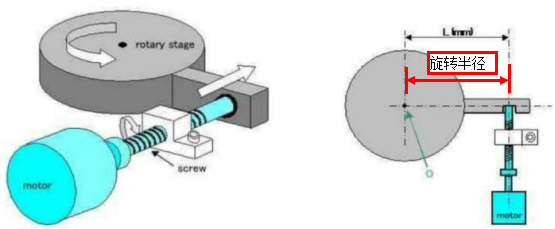
D. 旋转轴半径:旋转电机的半径;
E. 设置本页参数:将本页的数值输入框的数值赋予给系统相应的变量,但不保存文件中;
F. 应用所有:将首列(即上图 X1 轴)的所有参数设置赋予给后续 3 列;
G. 保存所有参数:将本页所有设置的数值保存在文件中。以下是四种典型对位平台参数设置方法:
1. XXY/UVW 平台(长方形对位平台):
a. 螺纹距参数就填写对应轴的螺纹距;
b. 分辨率参数就填写对应轴的分辨率;
c. 旋转轴比例参数就填写对应轴的减速机比率,如果没有减速机就填“0”;
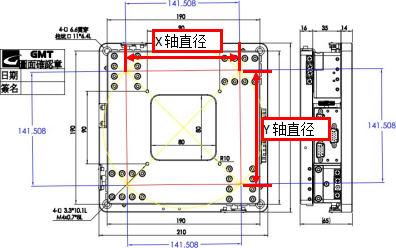
d. 旋转轴半径参数为图片中红色标记的数据,X 轴和 Y 轴半径不同, 如图所示;
2. XXY/UVW 平台(正方形对位平台):
a. 螺纹距参数就填写对应轴的螺纹距;
b. 分辨率参数就填写对应轴的分辨率;
c. 旋转轴比例参数就填写对应轴的减速机比率,如果没有减速机就填“1”;
d. 旋转轴半径参数为图片中红色标记的数据,X 轴和 Y 轴半径相同,如图所示:
3. XYR 平台(旋转轴为直驱):
a. 螺纹距参数就填写对应轴的螺纹距;
b. 分辨率参数就填写对应轴的分辨率;
c. 旋转轴比例参数就填写对应轴的减速机比率,如果没有减速机就填 1;
d. 旋转轴半径参数就填写 0,如图所示:
4. XYR 平台(侧推):
a. 螺纹距参数就填写对应轴的螺纹距;
b. 分辨率参数就填写对应轴的分辨率;
c. 旋转轴比例参数就填写对应轴的减速机比率,如果没有减速机就填 1;
d. 旋转轴半径参数为图片中红色标记的数据, 如图所示:

接收命令编辑设置界面
在“通信设置”->点击“接收命令”,弹出接收命令设置界面,如图
3.6.4.1 /.2/.3 所示:(注释:下图为 Modbus 为例)


指令 ID 序列号:此 ID 为系统定义的信号序号,不可以修改;
接收命令:此项可以根据需求改变,此项主要用于编辑 TCPIP 通讯发送的字符串协议内容;
接收状态:绿色为接收完成,黄色为正在接收中,红色为正在复位中;
命令状态:红灯 OFF 为正在接收到命令中,绿色 ON 为已接收到命令;
从站 ID:为 PLC 的站号;
数据地址:为 PLC 的数据寄存器地址,可根据 PLC 寄存器地址进行编辑;
当前值:当前读取 PLC 对应数据寄存器的值;
逻辑高值:为命令协议信号有效;
逻辑低值:为命令协议信号无效;
功能说明:为该命令的功能详细备注说明;
启动用户手动编辑协议:通过勾选“启动用户手动编辑协议”后就可以修改命令协议和数据协议的关键字、数据地址、功能详细说明。也可以操作对应地址读取寄存器数值,复位寄存器数值,以及复位所有寄存器数值,退出界面时,需要将 “启动用户手动编辑协议”的状态置为不勾选;
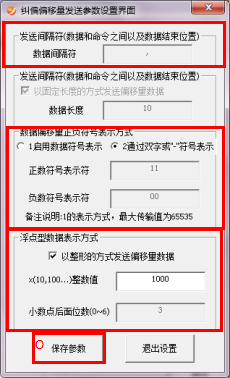
发送间隔符:视觉系统发送偏移量 X,Y,R 数据中间的分隔符“;”,可以修改;
1.格式为两个寄存器表达一组数据,第一个寄存器存放正负号,“11”代表正,“00”代表负。第二个寄存器存放数据,可以存放 16 位数据,范围是-2^16~2^16;
2.双字,格式为两个寄存器表达一组数据,两个寄存器合并这样就可以存放 32 位数据,范围是-2^32~2^32。
N. 浮点型数据表示方式:发送数据选择以整型数据或者浮点型数据发送, 如果勾选以整型数据发送,视觉系统会以发送数据×1000 倍后发送给PLC,因为视觉计算的偏移量数据是保存小数点后 3 位;
O. 保存参数:设置完参数后点击该按钮进行保存参数。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
