

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
灰度匹配,通过计算与模板的灰度分布相似度在图像中寻找目标。
通过鼠标操作 ROI 选定模板,进入【高级参数】设置匹配角度范围,最小相似度分数,并可修改模板。
通过图像方法主处理下拉框选择 灰度匹配
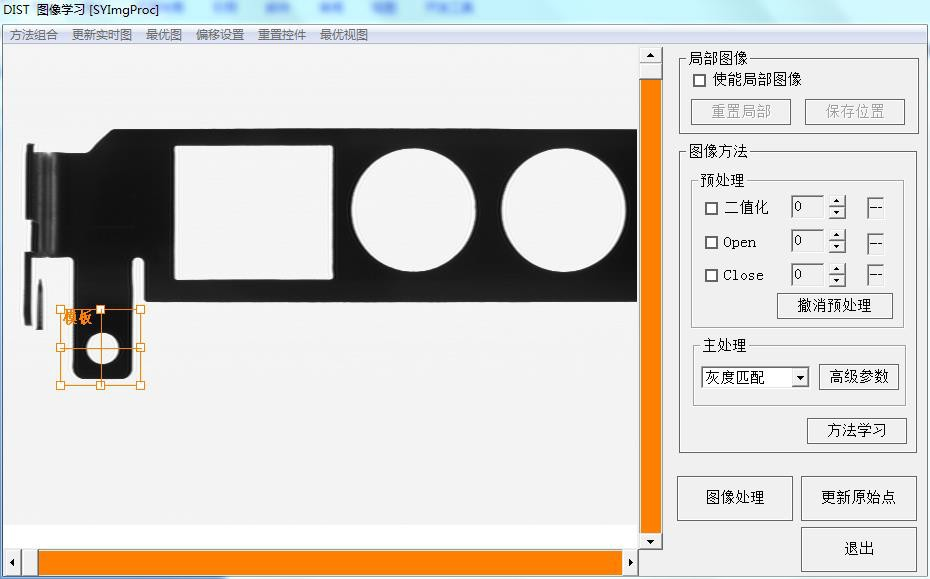
【鼠标操作】通过鼠标改变 ROI 的大小,并拖放至适当的位置作为学习的模板。
【方法学习】保存该方法及模板。
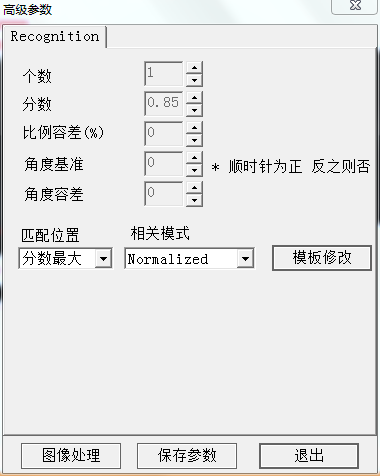
【个数】希望寻找的目标数量
【分数】目标与模板间的相似度分数
【比例容差】目标与模板间的大小比例变化
【角度基准】目标在图像中的旋转角度
【角度容差】在<角度基准>基础上的寻找角度范围
【匹配位置】分数最大,最左边的,最右边的,最上边的,最下边的
当图像中存在多个目标时,可选择返回其中符合位置的一个。
【相关模式】Standard、Gain Normalized、Offset Normalized 及 Normalized
Standard:目标区域与模板间直接的相关度计算
Gain Normalized:针对图像产生对比度变化,先进行增益归一化后再进行相关度计算
Offset Normalized:针对光照引起的明暗变化,先进行像素值整体偏移归一化后再进行相
关度计算
Normalized:考虑 Gain 和 Offset 变化的归一化相关度计算方式
【模板修改】弹出模板修改框对模板进行修改
模板修改
如模板存在干扰区域,可通过鼠标操作进行模板修改。
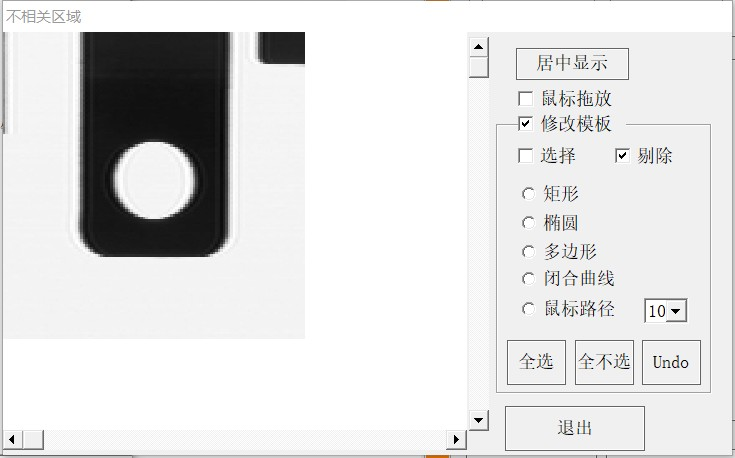
如下图,算法将不再考虑被涂的红色区域像素。

函数取值
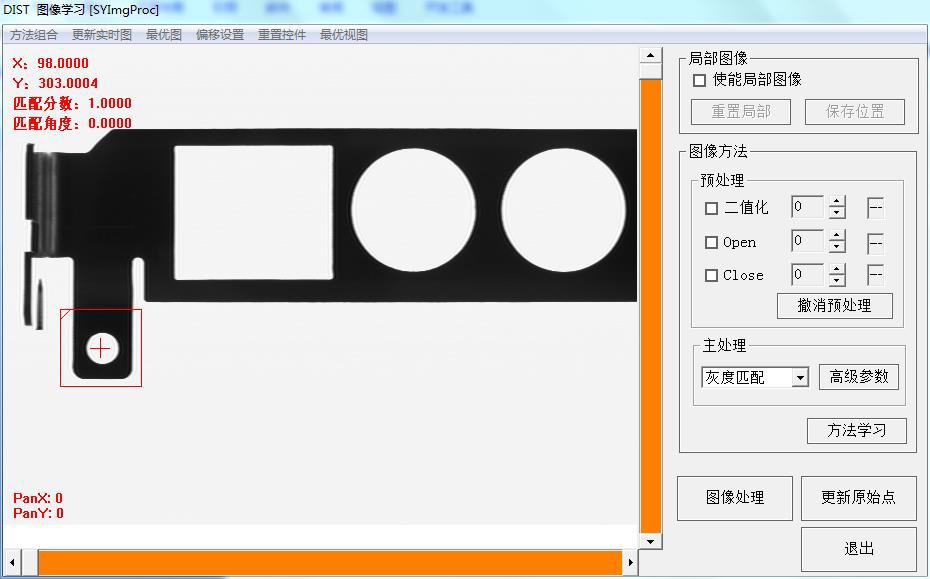
执行 SY_IP_ImgProc()进行处理后,返回 ImgProcResult 结构体。其中 X、Y 为目标的坐标,
MatchScore 为匹配分数,MatchAngle 为目标的角度,MatchScale 为目标的缩放比例。
另外,针对匹配多目标的应用,在高级参数设置寻找目标个数后。通过执行 SY_IP_Match_MultiPos()
可实现多目标结果返回。
其中可通过访问列表取得多目标结果:
list | MatchPosList; |
list | pMPList; |
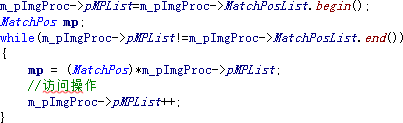
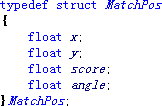
其中 MatchPos 结构体如下:
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
