
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A

丝印项目,设定对位目标位置后,每次都与目标位置比较,计算出位置偏差,使产品位置与目标基准位置中心角度重合。
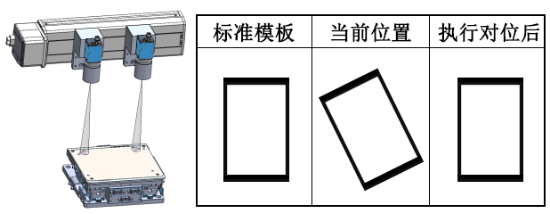
双相机丝印机对位模型,如下图:
该模型下常见的Mark标志方法如下:
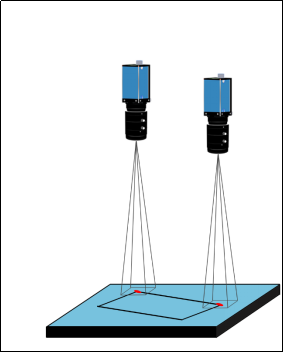
双mark自对位模型
说明:双相机模型两个相机分别拍摄产品的两个Mark点。平台端的产品来料位置不固定,找出两个Mark点后。根据纠偏算法找到偏移量,根据偏移量将平台端的产品对位到基准位置上(丝印基准位置)。
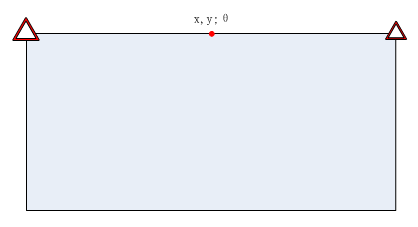
纠偏方法:以AB点连线的中心计算XY中心位置,以AB点连线的角度计算θ。
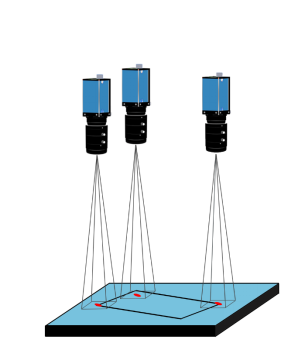
三相机丝印机对位模型,如下图:
平台端
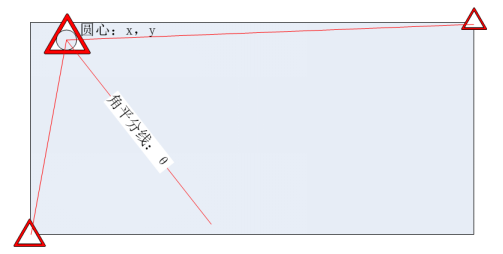
说明:三相机模型的三个相机分别拍摄产品三个Mark点,平台端的产品来料位置不固定,找出三个Mark点,根据纠偏算法找到偏移量,根据偏移量将平台端的产品对位到丝印基准位置上。
纠偏方法:如以B点位置计算产品XY中心位置,以AB连线和BC连线的角分线的角度计算θ。
四相机丝印对位模型,如下图:
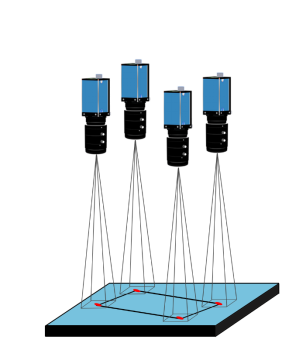
平台端
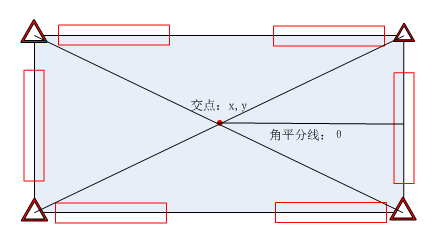
说明:四相机模型的四个相机分别拍摄产品四个Mark点,平台端的产品来料位置不固定,找出四个Mark点后,根据纠偏算法找到偏移量,根据偏移量将平台端的产品对位到丝印基准位置上。
纠偏方法:以AC连线和BD连线交点计算产品XY中心位置,以AC连线和BD连线的角分线的角度计算θ。

检测原理:在对位OK之后,检测每个相机当前Mark点和基准Mark之间的物理距离,原则上该值绝对值越小越好,代表产品的一致性和对位精度良好。
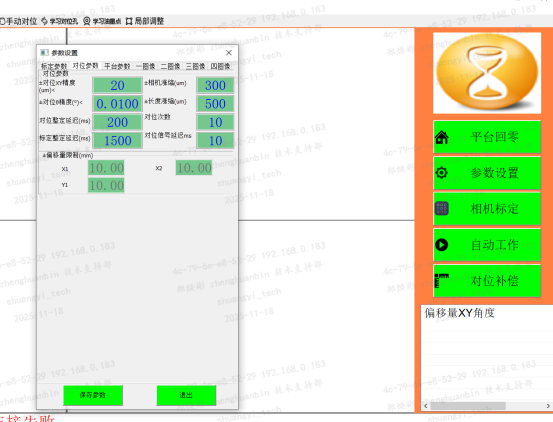
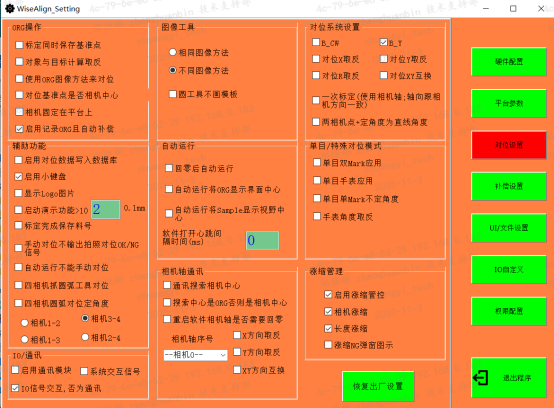
涨缩管控误差设置:如上图所示位置可以设置相机涨缩的误差范围值,如果产品一致性较差,可以适当放宽该数值。
检测原理:在对位OK之后,检测产品各相机对应的Mark之间的物理距离和基准产品的物距距离差值,原则上该值绝对值越小越好,代表产品的一致性良好。
涨缩管控误差设置:如上图所示位置可以设置长度涨缩的误差范围值,如果产品一致性较差,可以适当放宽该数值。
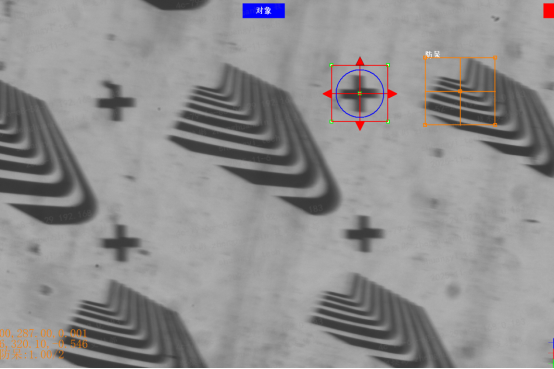
检测原理:增加一个灰度选取框,用于辅助主模板抓点防呆,在主模板抓点OK后,检测产品Mark点附近的固定位置上是否有符合产品工艺的灰度特征,相当于多了一道防错机制。
功能开启如下图:
制作模板时除主模板外,需要多做一个防呆模板。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
