

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
边缘
边缘(edge)是指图像局部强度变化最显著的部分。主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础。
图像梯度特征的常用算子:Sobel、Prewitt、Roberts
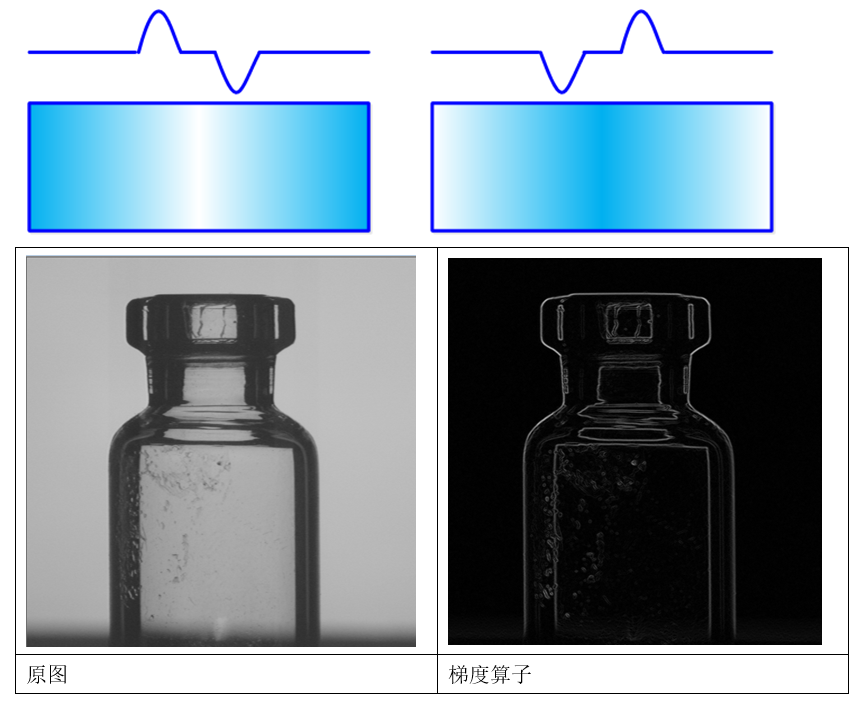
一阶导数法:梯度算子
对于左图,左侧的边是正的(由暗到亮),右侧的边是负的(由亮到暗)。对于右图,结论相反。常数部分为零。用来检测边是否存在。
二阶微分法:拉普拉斯
二阶微分在亮的一边是负的,在暗的一边是正的。常数部分为零。可以用来确定边的准确位置,以及像素在亮的一侧还是暗的一侧。
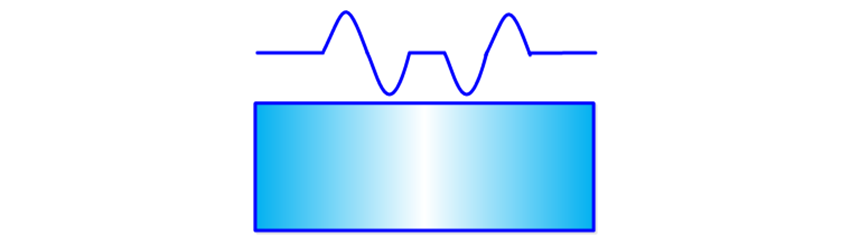
拉普拉斯对噪声敏感,会产生双边效果。不能检测出边的方向。通常不直接用于边的检测,只起辅助的角色,检测一个像素是在边的亮的一边还是暗的一边利用零跨越,确定边的位置。
索贝尔算子(Sobel operator)
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
Sobel卷积因子为:

该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1,y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
=[f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1)+ 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) +2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
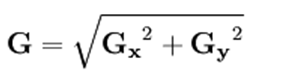
通常,为了提高效率 使用不开平方的近似值:

如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
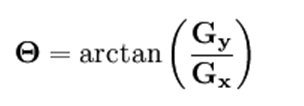
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
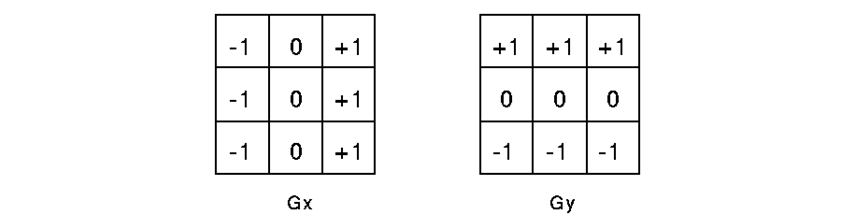
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
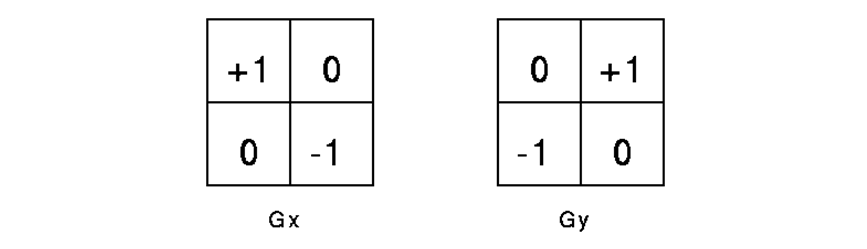
灰度公式为:

近似公式为:

具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
