热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


关键词:PS-based架构 线扫描影像检测系统
一、前言
机械视觉应用在各种产业的生产制造及品质检测已是行之有年, 利用机械视觉可以提升检测精度或加速生产速度,因此逐渐变成许多生产检测设备必备的一环。

目前市面上的影像检测系统大多采用面扫描(Area-scan)的摄影机进行影像的采集及分析, 但是随着产品尺寸的加大(例如:PCB, LCD面板, 晶圆), 在提高产能及精度的要求下, 面扫描摄影机的分辨率及取像速度无法满足这些要求的事实开始浮上枱面而系统业者也开始意识到线扫描(Line-scan)摄影机的分辨率及取像速度才能满足这些时势所驱的产业需求。
但是线扫描的检测系统必需利用运动速度才能取得面积影像。这跟面扫描的影像检测系统只要单纯的曝光即可取得面积影像的工作原理是完全不同的。 因此对于许多原本熟知面扫描影像检测系统的设计者而言, 要跨入线扫描影像检测系统除了要了解线扫描系统的工作原理及如何选择主要组件外,最重要也是最基本的是如何得到正确且等比例的线扫描影像。
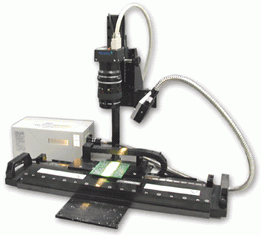
二、线扫描影像检测系统架构及主要组件
目前线扫描系统架构除了控制的主机系统及机构外, 主要组件分为视觉及运动控制两大主轴。
视觉主要组件包括:线性扫描(Line-scan)摄影机, 镜头(Lens),灯源(Lighting), 影像采集卡(Frame Grabber)。
运动控制的部份则可能包括:马达, 马达驱动器, 运动控制卡或PLC, 有时会搭配传感器(Sensor)或位置比对器作对象到位侦测辅助。
就控制主机系统来说除了运动控制外, 主要的工作内容在于影像数据的采集及运算, 而这部份已经占据系统绝大部份的资源及运算能力, 就目前市面上的线扫描影像检测系统而言, 许多大型线扫描系统甚至是一台系统机去专门处理一台高解析线扫描摄影机采集的数据量, 以满足客户对整个系统检测运算的时间及精度需求。当然这只是其中一种应用架构上的规划方式, 在线扫描可以应用的检测范围日益广泛的趋势下, 各种应用对于系统的规划以及主要组件的挑选都会有所差异, 因此笔者针对目前市面上的线扫描主要组件以及如何取到正确且等比例的线扫描影像概略的作了些整理, 提供有兴趣或刚开始接触线性扫描系统的使用者作为参考。
1、线扫描摄影机(Line-scan Camera)
目前市面上的 Line-scan Camera 分辨率从 512, 1024,2048, 4096, 8192,至12288像素(pixels)都有,通常刚开始接触线扫描系统的使用者在挑选 Line-scan Camera 时, 大多只注意到分辨率是否能够符合系统的目标精度需求, 而忽略了Line-scan Camera 本身的接口规格会影响影像采集卡的选择性, 另外Camera的设计特性究竟适不适合系统的需求, Line-scan Camera 的扫描频率(Line-Rate)的计算方式以及为什么有些Line-scan Camera扫描的速度可以提升四倍甚至是八倍? 以下是笔者略作整理的资料
(1)数据接口
目前数字工业摄影机及影像采集卡的数据接口标准包括: RS-422, RS-644或称LVDS (Low Voltage Differential Signaling), Channel Link 及Camera Link 这几种。
① RS-422 及RS-644(LVDS)的接口出现的较早, 由于数据格式的特性讯号的接口接头通常是68pin 或 100pin 的高密度接头, 但因为摄影机厂商定义的讯号接脚不尽相同而影像卡厂商各家的定义也不太一样, 因此在选择好 Camera 及影像卡之后一般也不太会想要轻易去变更(想想看要去接68pin 或 100pin 的讯号线, 换个可能就代表讯号线要重作或要再作个讯号转接板才行)。
② Channel Link 的接口原本是用来作数字平面显示器数据传输的标准(本身讯号格式也是LVDS), 特性在于接口接脚减少了但是仍然可以传输大量的数字数据, 而它其实也就是Camera Link 标准的前身,因此数据格式也就与Camera Link 兼容, 差异在于由于当时并未定义出标准接头形式, 因此各家厂商仍采用不同型式的接头接口, 讯号线仍然必需定制。
③ Camera Link 的标准是由数家工业摄影机及影像卡大厂共同制定出来的, 标准的本身是基于Channel Link 的特性, 并定义出标准的接头也就是讯号线也标准化了, 让Camera及影像卡的讯号传输,同时定义出基本架构(Base Configuration), 中阶架构(Medium Configuration), 及完整架构(Full Configuration) 的讯号接脚规范以及传输数据量。
(2)Line-scan Camera 的数据输出形式
目前的Line-scan Camera 撇开分辨率不谈, 通常Line-scan Camera 本身的数据产生频率都不会大于60MHz, 也许你会怀疑那么为什么有的机种可以到80MHz,160MHz甚至是320MHz呢? 其主要的原理是利用多重输出的方式去加速取像速度,目前市面上一般的 Line-scan Camera 输出方式有单输出(Single Tap), 双输出(Dual Taps), 三输出(Triple Taps), 四输出(Quad Taps)及八输出(Octal Taps) 这几种。
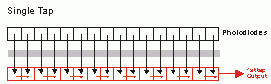
① 单输出 (Single Tap)
通常是在低解析或低速的 Line-scan Camera 上的设计, 它的特性是整个线性CCD的每个光电二极管在感光后即将光转成电荷讯号通过单一输出将数据传递出去。
Line Rate = Camera Data Clock / Camera Pixels
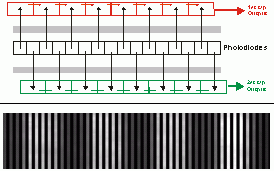
② 双输出 (Dual Taps)-奇偶输出
通常是在高解析或为了提高Line-scan Camera 传输速度的设计, 它的特性是整个线性CCD的每个光电二极管在感光后分成奇数及偶数将光转成电荷讯号分成两组将数据传递出去。
Line Rate = (Camera Data Clock / Camera Pixels) x 2
要是不小心设定成单输出时的影像, 就会如同右下图所示影像会有垂直的空隙, 影像在放大时便会发现 pixel 跟 pixel 中间的黑色影像,其实数据都是空的。
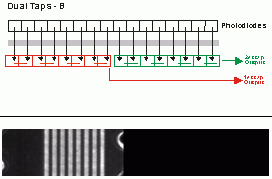
③ 双输出 (Dual Taps)-前后段输出
设计目的与上面的双输出是大致相同的, 主要差异在于它是将整个线性CCD的每个光电二极管在感光后分成前半段及后半段,将光转成电荷讯号分成两组将数据传递出去。
Line Rate = (Camera Data Clock / Camera Pixels) x 2
要是不小心设定成单输出时的影像, 就会如同右下图所示影像只有一半, 另一半变成黑色资料都是空的
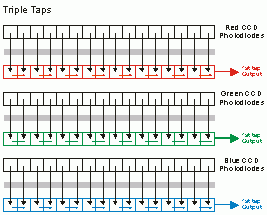
④ 三输出 (Triple Taps)
通常是用在R, G, B 三CCD 的 Line-scan Camera, 棱镜会依据光谱的波长特性(红光波长最长, 再来是绿光, 再来是蓝光)而分别将光线投射至红, 绿, 蓝三组CCD, 而每个CCD 也将会各别将光转成电荷讯号作输出。
虽然3 CCD各别有独立的 Data Clock, 但是因为必需要R, G, B 的数据组合在一起才会变成线性的彩色影像, 所以实际速度并没有因为每个CCD 有独立的 Data Clock而加快。
Line Rate = 3 x Camera Data Clock / Camera Pixels / 3
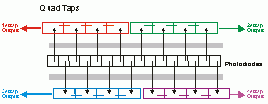
⑤ 四输出 (Quad Taps)
通常是在高解析或为了提高Line-scan Camera 传输速度的设计, 结合了双输出的奇偶输出加上前后段输出的特性分成四组, 让取像速度加快变成四倍。
Line Rate = (Camera Data Clock / Camera Pixels) x 4
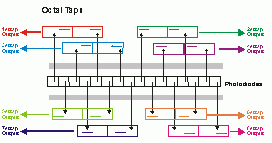
⑥ 八输出 (Octal Taps)
目前这类的设计是出现在超高分辨率(例如:12288pixel)的机种上, 除了分出前后段,而且各分出四组输出, 因此取像速度可以提高成八倍而不会因为分辨率很高而让线周期(Line Period) 拖太长。
Line Rate = (Camera Data Clock / Camera Pixels) x 8
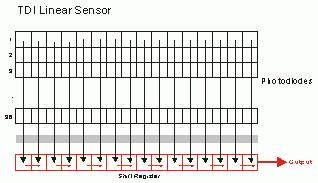
另外市面上还有一种 TDI (Timing Delay Integration) 型式的Line-scan Camera, 大致工作原理如下:
TDI Line-scan Camera
它的CCD 结构上较为特殊, 并非是单排的光电二极管而是96排的光电二极管下去一起感光作用, 也就是同样的一次曝光时间下, 它会累积 96排光电二极管的光量去转换成电荷讯号之后再传输出去, 由于累积的亮度较一般Line-scan camera 来得高, 故较适合应用在光线较暗无法提供充足亮度的系统上。
但是这种TDI 的型式十分注重取像频率及运动速度的一致性, 要是运动速度不稳的状况下取像出来会有模糊的情形。
(3)Line-scan Camera 的同步及曝光模式
目前Line-scan Camera 具备了下列内同步及外同步的取像模式。
Free Run Mode-通常又称内同步(Synchronization Mode)模式,摄影机厂商在出厂时都会设定为此模式因此又有人称之为Factory Mode, 这种同步模式是依照Camera 本身内部产生的时序去作曝光取像, 因此这种同步模式运作下影像卡无法主导Camera取像的时间点, 因此影像卡是处于被动接收数据的角色。 而内同步模式取像的曝光模式又可以分为 Edge-controlled Mode 及 Programmable Mode。
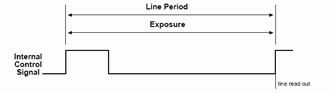
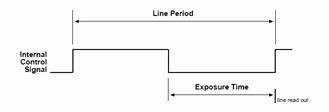
a. Free Run, Edge-controlled Mode
曝光时间与线周期时间相等, 由一组内部控制讯号产生一个上升方波作为开始曝光取像讯号, 直到下一条线周期的上升方波讯号进来时便将影像送出。
b. Free Run, Programmable Mode
在内部控制讯号产生一个方波, 当方波下降时即开始作曝光取像, 此为缩短曝光时间的模式(一般可以透过Camera 设定工具达成), 但是线周期时间还是维持不变。
ExSync. Mode-即是所谓的外同步(External Synchronization Mode)模式, Camera 本身并不会主动产生时序去作曝光取像, 而是通过影像卡传送Reset讯号去通知Camera作曝光取像, 外同步模式取像的曝光模式又可分为Edge-controlled Mode, Level-controlled Mode及Programmable Mode。
a. ExSync., Edge-controlled Mode
由外部送来的讯号作为同步触发讯号, 主要是取上升方波作为开始曝光取像讯号, 由外同步讯号的周期时间决定曝光取像时间及线周期。
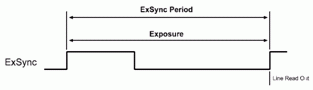
b. ExSync., Level-controlled Mode
由外部送来的讯号作为同步触发讯号, 主要是取方波下降时作为开始曝光取像, 但整个线周期时间还是由外同步讯号周期时间决定。

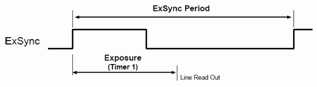
c. ExSync., Programmable Mode
由外部送来的讯号作为同步触发讯号, 但此上升方波仅作为开始曝光的决定讯号, 曝光时间长短可由使用者设定, 同时此设定的曝光时间也决定线周期时间。
(4)Line-scan Camera 的扫描频率计算方式
Line-scan Camera 的扫描频率的计算方式如下, 主要是Camera 的数据产生频率(Data Clock)及分辨率的对应关系。
扫描频率(Line Rate) = Camera数据产生频率 / Camera 分辨率Ex. Line Rate = 40MHz / 8192 pixels ≒ 4.8KHz (有时厂商订的规格数据会比计算量低, 但还是需以厂商订定为准)。
也就是说这台Camera 最高速度可以每秒取得大约4800条 8192 pixels 的线性影像数据,线周期(Line Period) = 1/ Line Rate, 也就是上述规格的摄影机每扫描一条线至少需要花费208us左右。
(5)如何计算线性扫描(Line-scan)摄影机的可视范围(FOV, Field of View)
可视范围(FOV) = Pixel cell size x 多少个 pixels x 工作距离 / 镜头焦距(Focal Length)。
Ex. FOV = 10um x 2048pixels x 160mm / 55mm =59.578mm。
Line-scan Camera 由于CCD sensor 的制程不一样或分辨率不一样, 因此每颗CCD上的光电二极管(Photodiode) 也就是所谓的每个pixel 的尺寸大小不一定相同, 也就是说就算是同样选择 2048 pixels的Line-scan Camera, 假若 A公司用的 CCD Sensor 的 Pixel cell 的尺寸为 10um, 但 B公司用的 CCD Sensor 的 pixel cell 为 7um, 那么就算是同样的工作距离及同样的 Focal Length 条件下, 两家公司的Camera FOV仍然是不相等。
2、影像采集卡的选择
Line-scan Camera 由于取像数据量大因此多为数字式, 目前影像采集卡主要就是以DSP架构跟非DSP架构两大主流。 DSP架构的影像采集卡一般价格较高,但是通常它在取得影像之后即可通过DSP先行将影像作前处理(例如:白平衡, 转换对照表(LUT, Look-up Table), 滤镜(Filter)处理, 遮光校正(Shading Correction), 甚至是扫描延迟补偿(Scan-delay compensation), 功能依据不同影像卡厂商设计提供而有所差异) 因此较为节省系统的后段计算处理时间。 至于非DSP架构的影像卡主要以快速取像为主,大多具备DMA (Direct Memory Access) 功能以取得较大的内存避免数据遗失(当然DSP卡大部份也会具备这个功能, 但是DSP卡去执行DMA的动作时影像大多已经过前处理而非原始数据), 之后再以编程方式由CPU去计算处理, 虽然DSP架构可以作影像前处理节省系统时间, 但由于影像卡厂商大多不开放给使用者自行更改, 故在价格及功能弹性上的考虑而言国内市场使用者还是以非DSP架构居多。
此外, 在选择影像卡时系统取像的最大可能数据量及数据接口也是考虑因素的一部份, 以资料量来说目前市面上的影像采集卡多为32-bit, 33MHz 或 64-bit,66MHz 的PCI bus 接口, 在选择影像卡时必需要先计算取像时的最大可能数据量, 同时必需考虑同一系统上其它控制卡的数据量会占多少频宽, 最常被忽略的就是网络传输端口本身也是占用PCI频宽的一份子, 因此最好保持PCI Bus 频宽的充裕性, 再不然就是选择影像采集卡本身有内建内存的规格以确保不会因为频宽不够而导致数据遗失的状况。
前面有提到Line-scan Camera 数据接口目前有分RS-422, RS-644(LVDS), Channel Link 及Camera Link 的格式, 基本上RS-422及RS-644(LVDS) 的数据格式完全不一样故影像采集卡也各自独立 ; 但是Channel Link 及Camera Link 的数据格式则完全兼容, 故一般选用Camera Link 规格接口的影像采集卡即可。 如前面提到的 Camera Link 有区分: 基本架构(Base Configuration), 中阶架构(Medium Configuration), 及完整架构(Full Configuration), 每个架构除了传输资料量不同外, 对于可以支持的 Camera Link 摄影机输出模式也有定义如下:

因此在选择Camera Link 影像卡时需考虑其架构规格是否能支持前端的摄影机输出模式。
3、光源的选择
在选择辅助光源时,切勿将区域扫描(Area-scan)用的交流电(AC Power)光源在线性扫描(Line-scan)上,线性扫描应该选用交流电(DC Power)光源作为辅助, 以下是简单的介绍有关摄影机曝光成像时间与光源频率之间的互动关系。
① 下图所示为一般区域扫描 (Area-scan) 摄影机 (取像速度大约在30fps) 在一般室内日光灯源 (交流电源, 频率为60Hz) 下的示波器取像讯号。日光灯的闪烁频率对这样的摄影机的曝光时间而言, 并不会有太大影响, 使用者仍然可以取得亮度均匀的影像。
② 下图所示为将区域扫描摄影机的快门调快, 这也就会造成曝光时间变短, 这时候摄影机明显受到日光灯的闪烁频率所影响, 在光线闪烁的亮暗之间取像出来的影像也会出现忽明忽暗的情形。
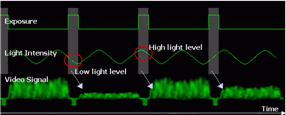
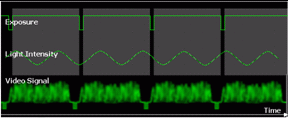
③ 线性扫描的曝光时间通常都是在Micro-second 等级, 因此假若是使用日光灯源用在线性扫描摄影机上, 那么呈现出来的影像就会如同下图的影像一样, 会出现周期性的亮暗不均影像。

除了交流电的光源闪烁频率问题外, 另外光源的选择及使用上还有下列几点注意事项:
① 光源的色温-只要是彩色取像对色纯度有绝对的要求时, 那么不论是Area-scan 还是Line-scan 的摄影机在选择灯源上都应选用白光, 偏黄或偏其它颜色的光源都会导致色偏的问题。 另外表面易有反射的待测物体应使用波长较长的偏红光源或冷光灯源, 波长较短的白光(例如:同轴落射光源或金属灯源)易让反射问题更严重。
② 光源的均匀度-Line-scan Camera故名思义它的感光区域只有在那细细的一条CCD区域上, 因此较适合使用线性灯源例如:高周波荧光灯管或加光纤导管的线性灯源(建议在线性导光管前面加上聚光镜, 可以强化光的强度避免光线散开同时可以延长灯源的寿命), 至于Area-scan 常会使用的LED灯源通常会作一些外缘形状的排列(例如:环形或矩形), 同时当排列角度及安装位置或距离不一样时, LED所交错出来的光源强度及位置也会有所不同, 因此不建议使用在Line-scan Camera 取像辅助。
③ 灯源的生命周期-一般的灯泡或灯管都会有生命周期从数千小时到上万小时的都有, 在使用上要注意何时应更换灯泡或灯管, 依据特性不一样例如:卤素灯源在生命周期的末期是亮度渐渐变暗, 但是有些金属灯源例如:金属卤素(Metal Halid)或氙气(Xenon)灯泡到生命周期末则可能是突然完全不亮, 因此在选择及使用上时都应注意灯源的生命周期以避免影响系统的取像运作。
④ 光源的架设位置-线扫描的光源架设位置主要是以Line-scan Camera 的CCD可以感光的区域为主, 但是依据待测物体的材质特性则架设位置也会有所不同, 例如:透明的玻璃或压克力材质其光源可采用背光位置, 至于不透明材质则可以由上或侧边投射光源, 但最好在设计机构时注意一下灯源的投射角度及范围是否提供CCD足够且均匀的光线。
4、镜头的选择
一般在选择镜头时可以看到镜头规格标示例如: 55mm/f2.8, 前面的55mm 即代表了焦距(Focal Length), 而后面的f2.8则代表最大光圈(Maximum Aperture, 数字越小入光量越大), 焦距长就代表景深越深(可以看的范围也会加大)但同时入光量也会越小, 所以必需尽量选择入光量较大的规格为佳。 目前市面上的镜头以C-Mount 及CS-Mount 接环规格的镜头种类及规格型式最齐全, 因为大多数从监控保全摄影机到工业级模拟摄影机大多设计这两种接环规格 (C-Mount跟CS-Mount的差异在于背焦距离不一样, 背焦距离是由CCD Sensor表面至镜头接环口平面之间的距离,C-Mount的背焦距离是12.52mm, CS-Mount则是17.52mm), 但是就Line-scan Camera 而言通常只要分辨率大于2048pixels(含)以上, 摄影机厂商便会将接环设计成F-Mount (背焦距离为12mm), 主要的原因在于C-Mount跟CS-Mount 的接环内径大约只有26mm, 而接环内径再扣掉镜头的外壳实际入光的内径范围顶多20mm, 再加上光线进入到变焦镜头时CCD通常以中心地区的感光最好外缘感光最差,有些2048pixels的摄影机虽然提供C-Mount接环让使用者更容易选购镜头, 但取像后外缘影像亮度通常会比较暗造成影像亮度不均的情形, 因此对于2048pixels以上的Line-scan Camera 来说采用F-Mount (接环内径约43mm) 镜头较佳, 但 F-mount 规格的镜头多设计用于单眼摄影像机用途, 故规格不如C-Mount 及CS-Mount 镜头来得多样化同时价格上较高。
另外像超高分辨率例如:8196pixels或12288pixels 的 Line-scan camera 通常除了特制接环的镜头规格外, 部份厂商仍以提供F-Mount 规格但提供软件的遮光校正(Shading Correction)功能去解决影像亮度外缘不均的问题。
5、运动控制的种类与特性
(1)PLC vs. PC Based
运动控制以PLC起源较早, 而PC-based 的运动控制是近十年的趋势, 但是早期使用惯PLC的系统设计者很难快速的由PLC转移到 PC-based 上, 主要的原因是硬件的控制架构及编程的逻辑与接口几乎是完全不同, 因此至今PLC仍维持一定的使用族群及市占率。 但就实务面上而言, 建立一套线性扫描的影像系统它的运动控制究竟是PC-based 还是PLC较为合适, 以下讯息可以提供作为参考。
1) PLC 架构本身是透串行讯号(RS-232或RS-485)下达运动速度位置等指令, 这种架构在作Area-scan 的影像系统搭配上问题不大, 但是一旦应用在Line-scan 的影像系统时, 由于 Line-scan 对于每条 Line 的触发取像位置要求十分高, 再加上Encoder上的讯号都为相位讯号(AB phase)无法直接用来作触发讯号, 因此需要使用桥接接口的转换后再将讯号送给影像处理平台, 常见有下列几种方式。
① 外加一台计算机上面加一片位置比对卡接收Encoder的讯号加以编译。
② 在Encoder外面再加一组转换模块转成TTL或LVDS讯号。
③ 外挂一台位置比对器(价格贵, 少见) 或光学尺。
④ 或其它桥接模式。
尽管有上述的方式可以去作到位置比对, 但是毕竟是透过桥接而取得,因此遇到高速取像时讯号遗失的机会便非常高。
2) PC-based 架构是利用运动控制卡送出指令脉冲(Command Pulse)去下达位置及速度, 并通过Encoder传回马达的反馈脉冲(Feedback Pulse), 同时可以在行进过程中进行位置比对功能(部份运动控制卡并不具备这类功能), 并且在到位之后送出TTL或LVDS的到位讯号作为外同步偶触发或连续触发讯号去触发Line-scan Camera 取像, 由于无需经过桥接接口的转换因此可让Line-scan的每条Line的触发取像同步且正确。
6、皮带/线性滑轨/滚珠螺杆
另外在运动控制机台的选择上, 目前常见的有皮带, 线性滑轨及滚珠螺杆这几种基本形式或龙门式综合使用。
皮带-不建议使用在Line-scan 的取像主轴上, 因为通常皮带Key的间距对Line-scan 而言不够精细且容易有跳格的情形。
线性滑轨-在极速运动下或保养不好的状况下容易有失步的情形。
滚珠螺杆-有单向背隙(Backlash)的问题, 但由于每支滚珠螺杆的背隙通常是固定的(大部份制造厂商会附上背隙规格数据), 因此是属于可计算补偿且不致于影响Line-scan 的位置比对及触发取像。
7、光学尺的主要作用
一般而言是可以透过位置比对得到马达目前的运行位置, 但是任何一组运动控制机台, 在经过长时间的运行及磨损下难免会产生机构上的变形误差, 因此不论是Area-scan 或 Line-scan 的系统平台, 通常只要是系统要求绝对的精度跟重现性时, 建议最好在上面加一个光学尺以增加精确度。
三、如何得到等比例的线扫描影像
在对线性扫描影像组件有了概念之后, 接下来要介绍的是实务面上的部份。由于Line-scan Camera 每次感光成像都是只有一条线的FOV, 因此必需要透过运动速度下的连续取像才会形成面积影像, 也就是说每套线性扫描影像系统它至少是含一轴以上的运动控制才能取像运作。 但是并不是有连续的运动就可以取到正确的影像, 通常运动速度要是跟取像频率不一致时则取像出来的结果不是变形再不然就是有些线段数据根本没扫描到而造成数据遗失, 因此如何取得正确而且等比例的线性扫描影像, 笔者在此提供包括基础测试及整合测试的参考要点。
1、基础测试
(1)马达运动控制
PC-based的系统大多通过运动控制卡去跟马达驱动器进行沟通进而让马达运转至目标位置, 因此在运动控制的基本动作上首要确认运动控制卡所发出的指令脉冲(Command Pulse)必需要跟编码器(Encoder)的回馈脉冲(Feedback Pulse)调整一致, 再来便是确认每送出一个 Command Pulse 时实际移动多少距离。
实作测试:
a.先确定Command Pulse = Feedback Pulse
b.送出Command Pulse 之后再量测实际的移动距离, 例如:送出 Command Pulse =10,000 实际移动距离为10mm时, 则代表1Pulse = 1um, 有了这个数据对于后面的Line-scan触发位置就较为准确。
(2)Line-scan Camera取像测试
由于Line-scan Camera 并不像 Area-scan Camera 有较大的感光面积, 因此第一次使用 Line-scan Camera 的使用者都会对于几乎看不到光影成像(特别是把镜头装上去之后)而感到困惑, 进而怀疑到底是 Line-scan Camera 没设定好还是坏掉了, 有时甚至怀疑是不是影像卡的问题, 以下是几个简单的检查方法。
a.将Line-scan Camera 接至影像采集卡, 利用 Line-scan Camera 厂商提供的设定工具程序 (一般都可以从厂商的网站上下载), 先确定Camera 设为内同步模式之后再利用影像采集卡的取像工具程序(必需要设定选择该款Camera 的设定档案)先试取像, 取像时可以不用装镜头而直接将Line-scan Camera 的CCD Sensor 直接面对灯光,正常取到像时可以看到光线的反应。
b.另一种方式是利用Line-scan Camera 内建的测试影像(Test Image, 或有的称之为Test pattern) 去测试, 首先必需要使用Camera的设定工具程序将输出模式改设定为输出Test Pattern, 则正常状况下影像采集卡那端就会接收到Test Pattern 的影像。
c.当上述方法皆取不到影像且影像卡的取像工具程序显示没有讯号输入时, 则有下列几种可能:
· Camera 接到影像卡的连接端口设定错误, 例如明明接到B接头却设定成A接头
· Line-scan Camera 电源没接
· Camera 的讯号线有问题, 请换条线试试
· 最糟的状况-Camera 有问题需要换另外一台试试
d.当然影像卡坏掉的状况也不无可能, 但最好是先到系统的硬件管理员下先查看是否是驱动程序没装好,或者是驱动有装了但是还是认不到卡, 要是连卡都认不到时请换个PCI插槽或计算机试试, 要是还是认不到卡那么就赶快送修。
2、整合测试
(1)Line-scan Camera 与灯源搭配之取像
在确定Line-scan Camera 跟影像卡的取像功能正常之后, 接下来的动作则是要把Line-scan Camera 架起来至机台的预定工作距离的位置, 之后把辅助灯源架上去(建议机构设计上预留可以调整位置及角度的弹性), 确定光源的投射位置可以让Line-scan Camera 的CCD Sensor 感光(注意: 线性灯源的方向性应与Linear CCD 呈水平), 然后放一张白色纸张在待测区再作一次取像测试, 这个动作主要是要先确定光源的架设位置及角度是否正确, 白色纸张可以辅助确认光源的均匀度。
关于Camera 的架设位置, 有些系统设计者会考虑让待测体固定位置不动, 反而让Line-scan Camera 固定在可以运动的轴承或机械手臂上, 关于这点笔者建议最好还是Camera 固定不动由待测体移动位置去作成像检测, 主要的原因在于当Camera 处于运动的状态下, 其加减速的震动可能会让取出来的影像模糊失焦。
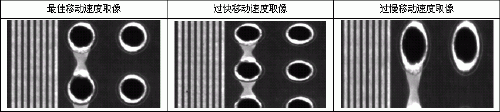
(2)马达运动与摄影机取像之频率
确定Line-scan Camera 跟灯源的架设位置可以取到均匀的影像后, 接下来即可开始结合运动控制测试连续取像, 这个动作最重要的部份在于而确定Line-scan 的Line Rate跟运动速度之间的关系, 过快或过慢的运动速度都会造成取出来的影像变形, 因此要确定最佳移动速度才可以得到不变形的影像, 如何知道该下多少Command Pulse 是最佳移动速度可透过以下的公式计算出来。
公式1-运动速度(Moving Speed) = 像素尺寸(Pixel Cell Size) / 线周期(Line Period)
公式2 -最佳移动速度(Command Pulse of Velocity) = 单位pulse移动距离 x Moving Speed
假设BASLER L101k-2K Camera 的分辨率2048pixels 且Line Rate 为 9.42KHz, 每个pixel cell 的尺寸为10um,Line Period = 1/9.42KHz ≒ 106.2us,则Moving Speed = 10um / 106.2us ≒9416.19um/s
假设送出Command Pulse = 10,000实际移动距离为10mm时, 则代表1Pulse = 1um,那么最佳移动速度 = 1um x 9416.19um/s ≒ 9,416pps
(3)外部触发(External Trigger)同步取像
当然上述的运动速度数据有小数点上的差距争议, 因此就实际Line-scan 取像上还需搭配正确的位置比对作外部触发取像, 才可以达到等比例的影像, 外部触发的讯号目前主要有分为 TTL 及LVDS, 而外部触发的讯号多是来自Encoder 的到位讯号, 因此针对补偿些微差距的问题, 部份影像卡厂商会提供取像转换比例 (Rate Conversion Ratio) 功能, 提供使用者去设定Line Pitch 跟 Encoder Pitch 之间的比例对应进而达到补偿的目的。
一般影像卡的触发取像模式包括硬件触发(Hardware Trigger), 软件触发(Software Trigger)及联合触发(Combine Trigger)三种模式, 硬件触发主要是将 Encoder 的实际到位讯号以TTL或LVDS的形式将讯号接至影像卡的触发接点去触发Camera 取像(注意: 部份影像卡接收触发的接点本身并没有作绝缘保护, 因此需要先将Encoder 到位讯号接到光耦合器(Photo Couple) 再从光耦合器接至影像卡的触发接点, 否则很容易把影像卡给烧坏掉), 而软件触发则是利用程序计算或条件式去触发取像, 联合触发则是结合硬件触发及软件触发的模式然后依据系统设计的执行需求去取决触发取像的时间点, 但是以Line-scan取像的特性而言笔者还是比较建议使用硬件触发较为准确。
Line-scan 影像卡的取像模式分为WEB及PAGE两种, 通常Line-scan 取像可以确定水平的FOV, 假若已知待测体面积的情况下(大概可以计算扫描完一个大概是多少条Lines时) 便可使用PAGE模式取像, 但是假若无法预知待测体的尺寸面积情况下(例如:纺织品, 纸张, 胶卷/底片)则需使用WEB模式取像。
触发取像是可以决定究竟是要使用连续触发取像(Trigger per Line),或者是要片段触发取像(Trigger per Page), 例如:每500条Lines送出一次Trigger, 每次Trigger连续抓500条Lines的数据, 然后先组成片段影像进行影像处理。
1) 连续触发取像
这种触发取像需求只能使用硬件触发的方式, 一定要把Encoder实际的到位讯号接至影像卡的触发接点才行, 另外连续触发取像还有一些限制, 例如: 当马达Encoder的分辨率不够, 或者运动控制卡送出Trigger频率不够快,或者影像卡本身接收触发的频率不够快时, 那么即使Camera 规格可以作超高频率取像(部份高速Camera取像频率每秒超过7万条Lines), 但是系统运行起来仍会因为其中某项规格无法满足而被迫降低取像频率, 因此假若系统一定要用连续触发取像时, 则在高速取像的规格搭配上还是必需注意这点。
2) 片段触发取像
这种触发取像需求对于运动速度及取像频率之间的要求度非常高, 取像的速度一定要一致才行(注意:千万别在运动加速段或减速段送出Trigger, 这会造成取到的影像变形)。
透过上述的整合测试可以让Line-scan系统作正常的取像运行, 但是就实务上的系统检测而言系统的校调(Calibration)还是绝对必需的。而系统的校调是可以透过一些辅助工具去达成, 但是要重现最佳的检测精度还是必需靠系统设计者的重复验证去决定最佳的校调顺序与方法。
四、结语
目前许多高科技产业的生命周期, 不外乎从先期开发制造到量产技术转移而后最终到薄利代工的成本导向, 而不论哪个周期对于检测设备的需求总是会不断的出现, 而且值得欣慰的是虽然目前并没有革命性的高科技产业是由国内业者自行作先期开发制造, 但是至少那些技术领先的国家在作量产技术转移的规划时第一个会想到可以承接的就是台湾, 因此国内的检测设备业者在这部份便有一些得天独厚的环境, 可以率先取得这些台湾承接量产技术厂商的生产检测设备需求, 但是有商机跟需求存在的同时, 提升检测系统的技术与规格与产业能够接轨也是设备业者不可怠懈的课题。此篇文章对于已开发线扫描的系统业者而言或许仍有许多不够深入的地方, 但是希望对于有意想跨入线扫描系统但却完全没经验的系统设计者而言能有所帮助。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
