热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


MasterAlign背光贴合视觉应用软件
MasterAlign背光贴合视觉应用软件提供一种智能机器视觉图像处理方法,提供建模工具,快速提取图像中的待处理物件边缘点像素坐标信息。并结合视觉与运动执行结构的标定,转换为机械坐标信息,控制机械手进行纠偏,修正固定位置后进行贴合作业,大大提高的生产效能。
MasterAlign背光贴合视觉应用软件采用视觉引导,与现有的技术方法相比,利用视觉引导及利用建模工具,加快了产品边缘点像素获取并转换成执行机构坐标,减少换型消耗的时间。利用建模工具的亚像素提取轮廓能力,提高了待处理产品的位置精度。本方法已于实际生产加工流程中发挥其有效的作用
1、产品建模方便快捷,减少产品换型带来繁琐操作的困扰
2、控制机械手精准对位
3、软件适用于不同行业的物料对位
MasterAlign背光贴合视觉应用软件配合UVW平台案例
系统架构
视觉定位系统采用背面向光方式,CCD从上往下拍摄,进行图像分析定位。相机将计算出的像素坐标转换为机械手的物理坐标,视觉软件与PLC进行通讯,将视野内的物理坐标发送给PLC后让机械手进行纠偏,修正固定位置后进行贴合作业。

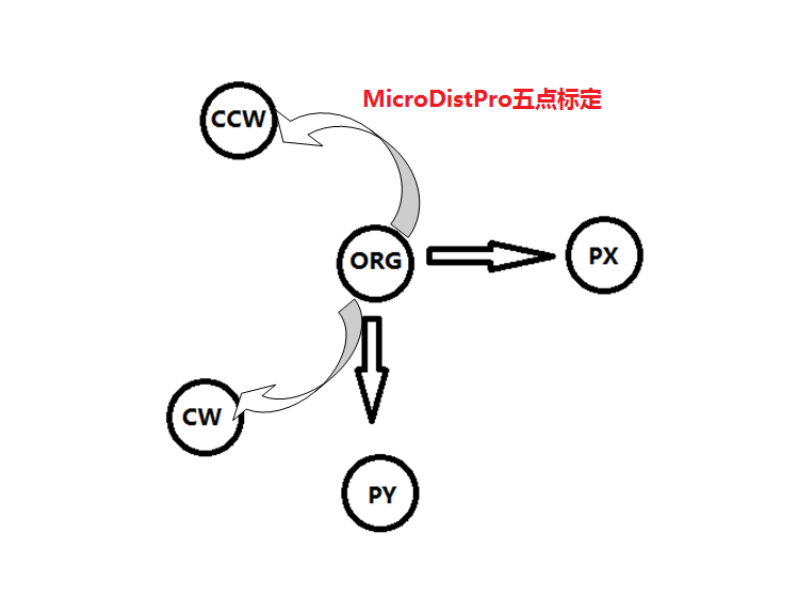
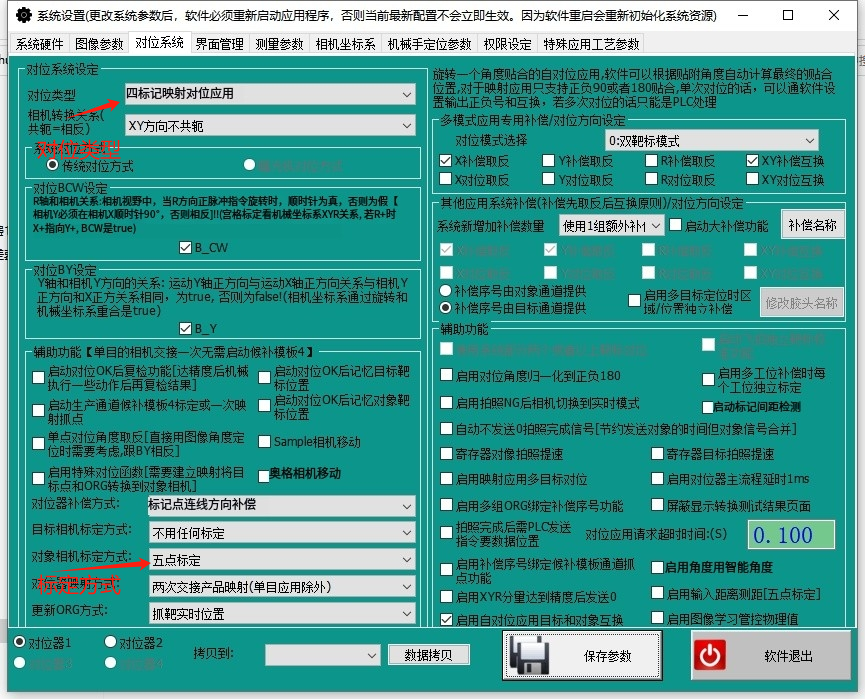
系统采用五点标定,通过软件控制XYR平台自动完成相机和机构的关系建立
设置软件配置
设置软件配置-基础参数
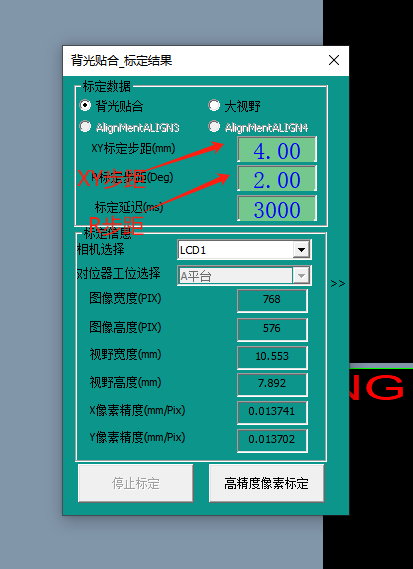
设置五点标定步距和旋转角度
软件主页

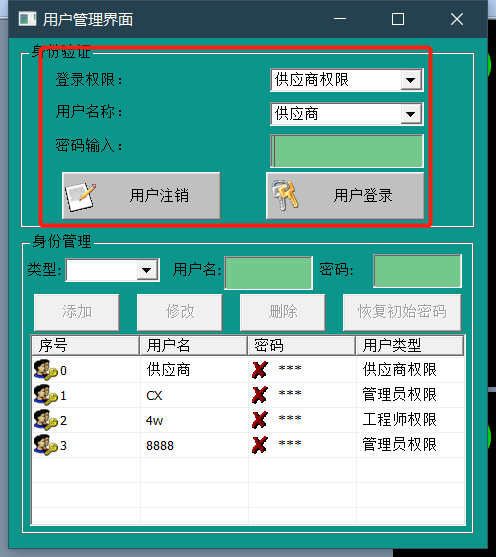
软件权限登录
选择软件图标

在下拉菜单选择用户

在用户登录界面进行登录,选择“登录权限”“用户名称”输入密码(供应商密码:310525),后点击用户登录
料号切换
选择软件图标

在下拉菜单选择料号

进入料号管理页面:
1:双击左键:将当前选择的料号导入为当前使用的料号
2:双击右键:将当前选择的料号进行删除。(不可恢复)
3:在框内填入需要新建的料号名称,后点击“新建料号”,会创建一个新的料号,并将当前使用的料号所有数据复制到新料号内。点击“修改名称”会将当前选择的料号名称改为您所填入的新料号名称。
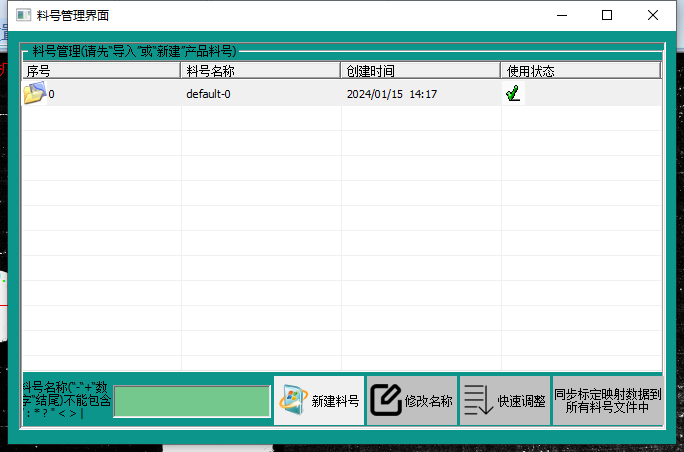
料号界面
软件主页
软件主页包括自动工作和全体停止按钮。

软件主页
视觉系统开始自动工作

视觉系统整机复位,io复位,状态复位
图像系统

图像系统
图像系统包括主模板登录、抓取mark测试、候补模板登录、离线导图、手动对位、相机设置。
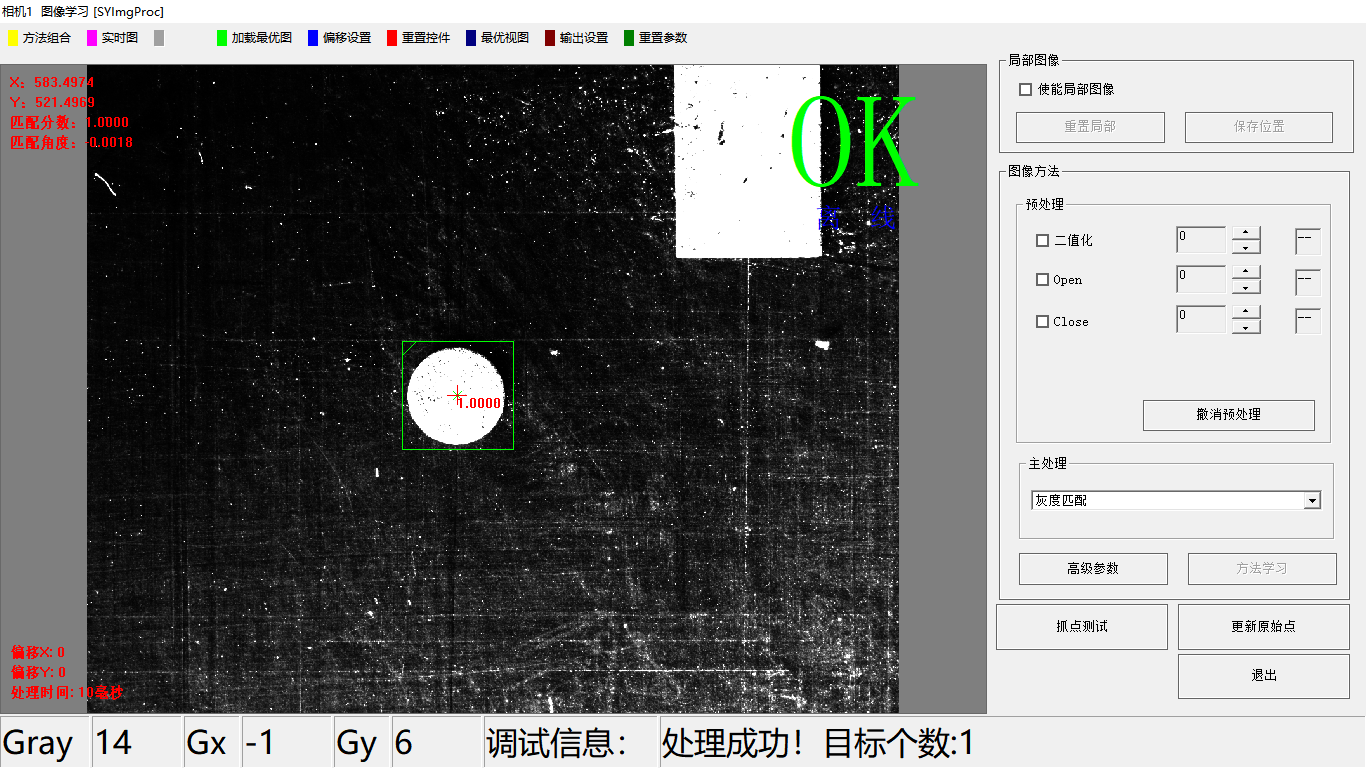
主模板登录
1、选择处理方法
2、下拉重新选择“灰度匹配”,黄色的模板框工具则会显示出来,调整模板框位置和大小到合适,再点击“方法学习”,则学习记录当前的模板。
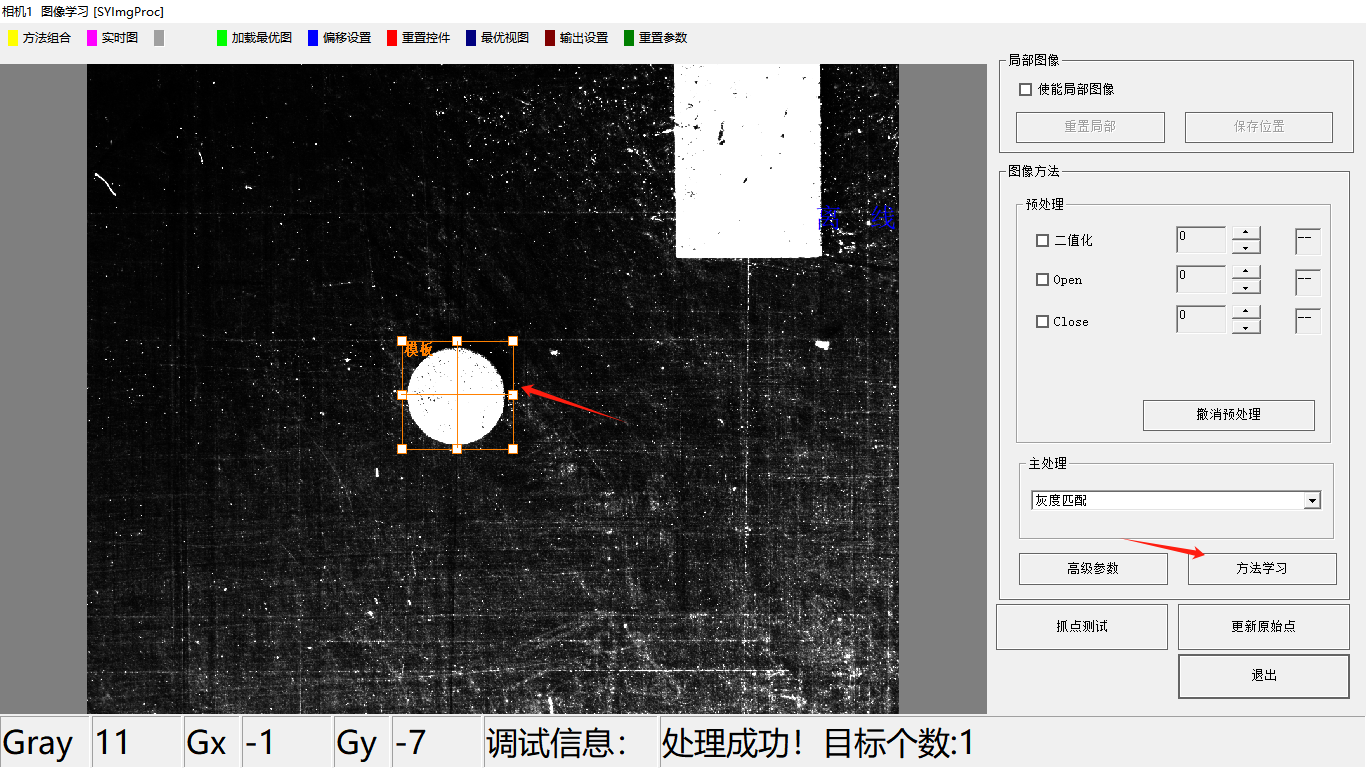
3、显示OK则完成了模板制作
4、调整高级参数。点击“高级参数”,进入高级参数界面,调整参数可根据实际情况修改“分数”、“个数”、“比例容差”、“角度容差”、“匹配速度”、“模糊度”等参数。
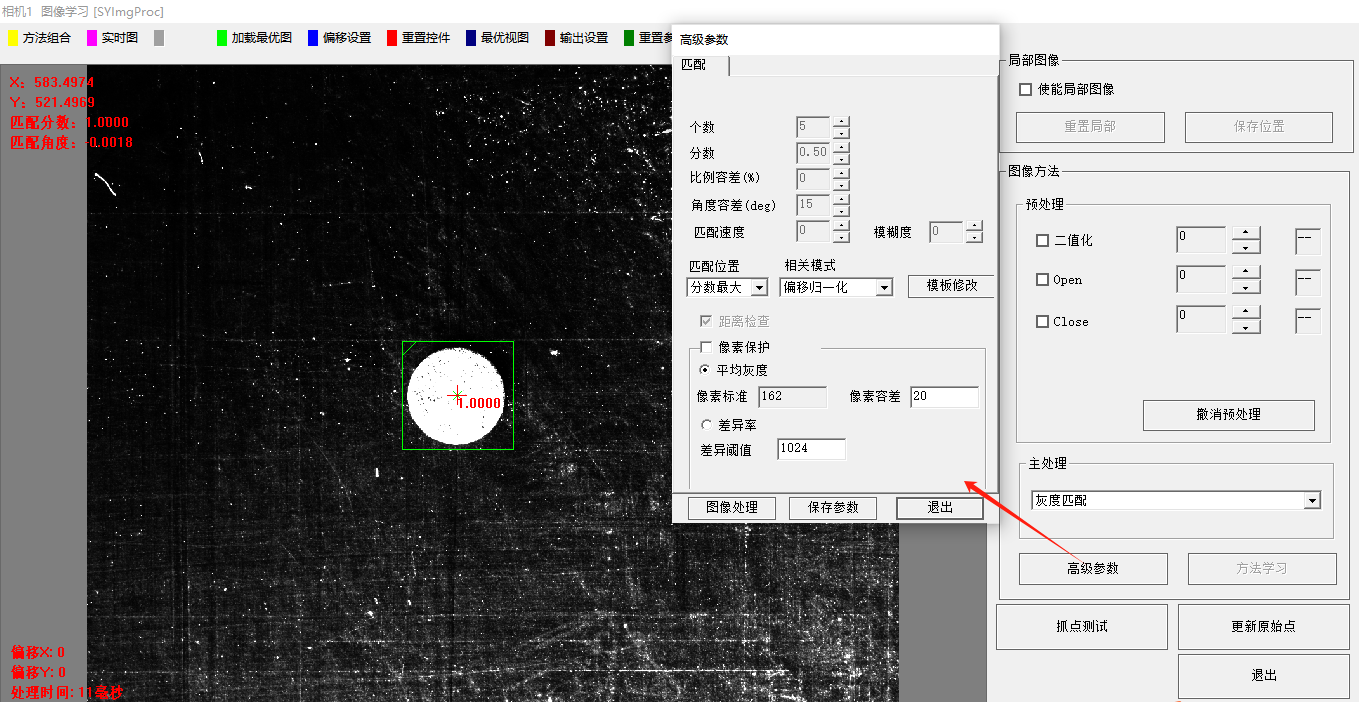
(1)个数:图像中存在多个目标时,设置【个数】,即可返回多个目标。
(2)分数:目标与模板间的相似度分数。分数越高,表示目标与模板越相似。分数在设置值之下的目标,将会被剔除。
(3)比例容差:目标与模板的大小比例变化时,设置合适的比例容差,即可寻找大小变化的目标。
(4)角度容差:图像中的目标发生角度变化,设置角度容差,即可更好地寻找角度发生旋转的目标。
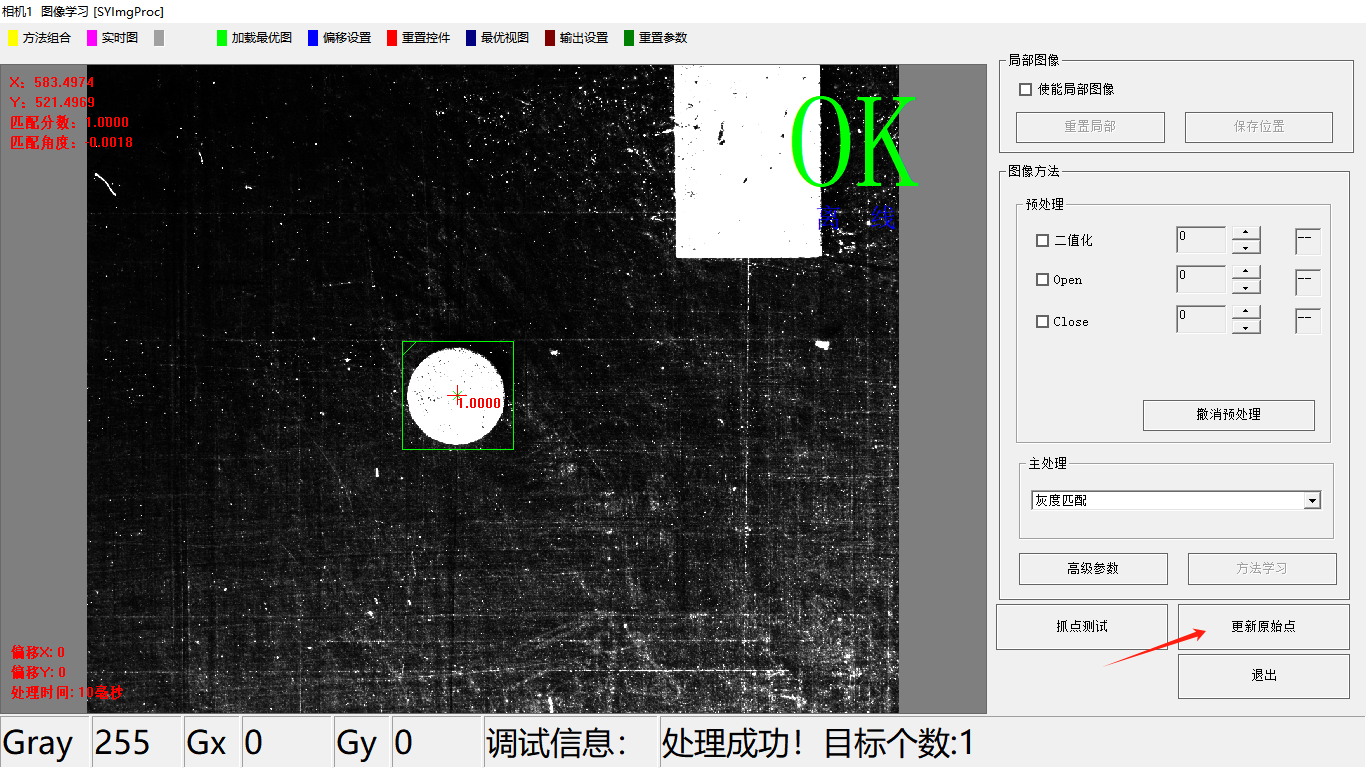
5、更新原始点
抓取mark测试
测试当前通道mark抓取结果。
候补模板登录
候补模板管理:包含启用/禁止候补模板,候补模板登录,抓点测试等。目前系统中单个图像通道有主模板+四个候补模板的方式;其中三个候补模板用于当主模板抓点失败后,自动根据启用情况,调用候补模板1,2,3进行靶标获取,如果候补模板1,2,3同时启用了,系统首先会调用候补模板1,如果1抓靶失败的话,才会启用2,以此类推。
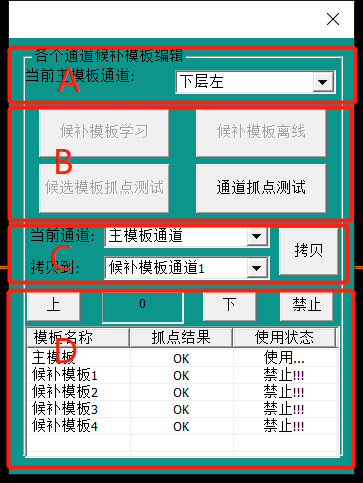
候补模板登录
区域A:选择需要设置的候补模板对应的主通道;
区域B:候补模板学习,离线导图,候补模板抓靶测试以及整个通道抓靶测试;
区域C:将主模板参数拷贝到候补模板中去;
区域D:候补模板抓点结果以及使用状态;候补模板4是专门用作标定或者映射时用。
离线导图
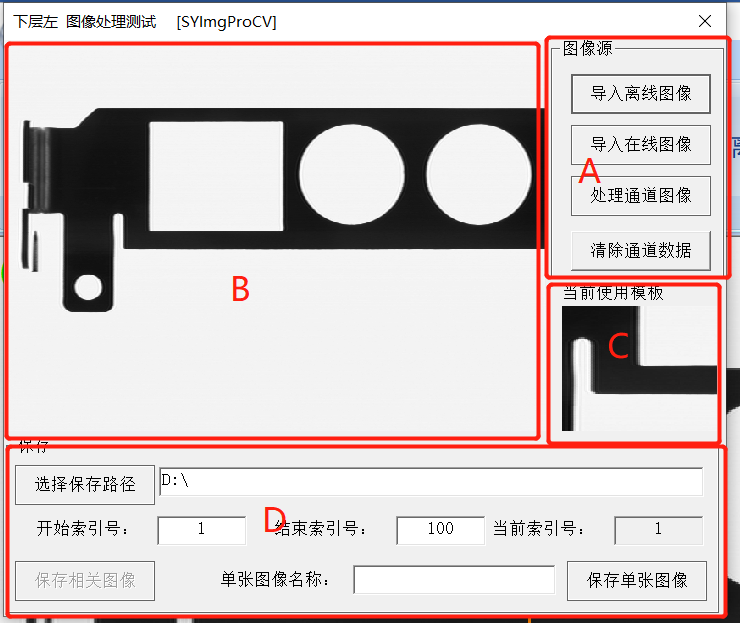
区域A:图像源操作,导入离线/在线图像,图像处理以及清除当前通道数据;
备注:如果在进入图像学习界面中出现奔溃等异常,有可能是当前料号文件中的图像处理参数出现异常,导致用户无法再次进入到靶标登录界面中。用户可以先清除当前通道数据,然后再重新导入料号文件即可。
区域B:显示图像以及抓点位置;
区域C:显示当前通道使用的模板;
区域D:图片保存文件路径以及名称设定操作。
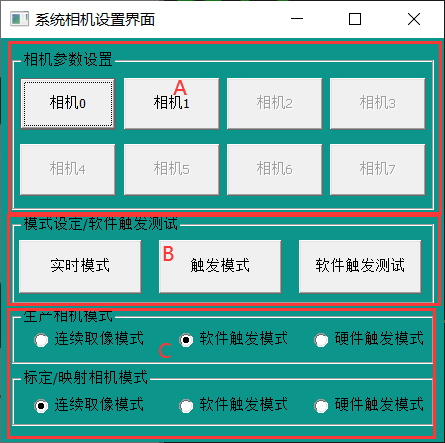
相机设置
区域A: 相机参数设定,相机的参数分通用参数和高级参数;
区域B: 相机模式切换,实时模式和触发模式以及软件触发测试;软件触发测试中包换当前相机的帧率以及丢帧情况;
区域C:生产/标定/映射时的相机模式;
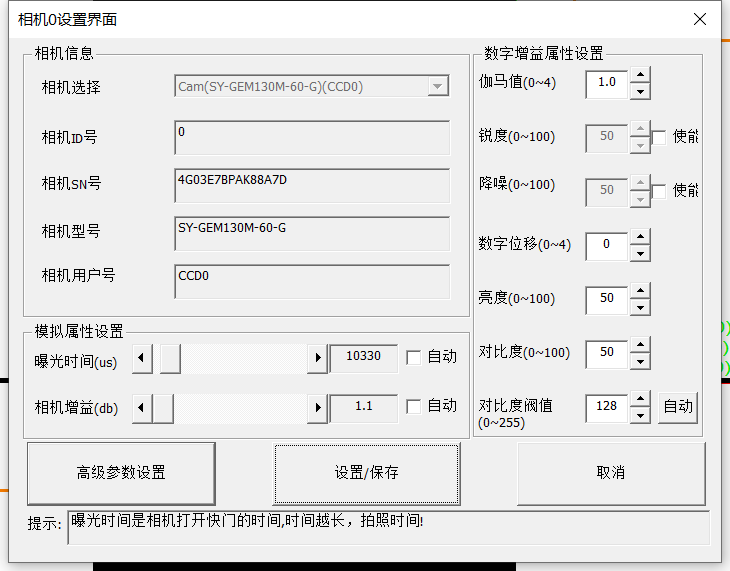
通用参数设置
参数说明:
曝光时间(us):相机打开快门的时间。曝光时间越长,图像越亮,但拍照时间也越长!
相机增益(db):相机感光芯片的参数,以2的N次方增加亮度,调整比较灵敏并且会带来噪点,默认值是1!
Gamma伽马值(0~255):相机感光芯片的参数,1时不起作用,小于1暗的地方变亮更多,大于1亮的地方调亮更多!
Sharpness锐度:相机FPGA的参数,边沿锐度增强范围是0~100。默认不启用。
Denoising降噪(0~100):相机FPGA的参数,相机底层图像处理功能。默认值是50,能够降低图像噪点,但是同时会影响边沿锐度。默认不启用。
DigitalShift(0~4)数字位移:相机FPGA的参数,能够增强亮度,比较敏感。默认值是0,以2的N次方增加。
BrightNess(0~100)亮度:相机FPGA的参数,能够增强亮度,但是相对比较平滑。默认值是50。
Contrast(0~100)对比度:相机FPGA的参数,能够增强对比度。默认值是50。
ContrastThresholdValue(0~255)对比度阈值:相机FPGA的参数,默认值是128,大于该值是亮区,小于该值是暗区!
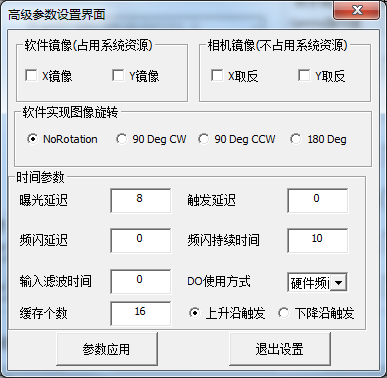
高级参数设置
参数说明:
镜像:将图像沿着X或Y方向进行翻转。
软件镜像:通过算法将采集到的图像进行翻转,会占用系统资源。
相机镜像:通过设置相机参数使图像进行翻转,不占用系统资源。
旋转:将图像按顺时针或逆时针旋转一定角度。
NoRotation:不对图像进行旋转操作。
90Deg CW:将图像顺时针旋转90度。
90Deg CCW:将图像逆时针旋转90度。
180Deg:将图像旋转180度。
曝光延迟:收到曝光信号后延迟一段时间(us)后再进行曝光。
触发延迟:收到触发信号后延迟一段时间(us)后再进行触发。
频闪延迟:光源为频闪模式时,接收到频闪信号后延迟一段时间(us)后再进行触发。
频闪持续时间:光源为频闪模式时,每次点亮持续的时间。
输入滤波时间:对输入信号进行滤波的时间参数。
DO使用方式:硬件频闪、软件频闪、通用DO频闪。
缓存个数:相机缓存中存储的图像个数。
触发方式:上升沿触发或者下降沿触发。
光源设置
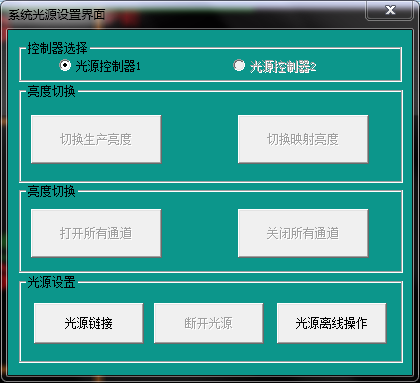
在“图像系统”->点击“光源设置”,弹出光源设置界面
控制器选择:目前系统最大支持2个光源控制器;
切换生产亮度:点击该按钮后4个通道光源亮度会变为生产亮度;
切换学习亮度:点击该按钮后4个通道光源亮度会变为学习亮度;
打开所有通道:点击该按钮后4个通道光源亮度都会打开;
关闭所有通道:点击该按钮后4个通道光源亮度都会关闭;
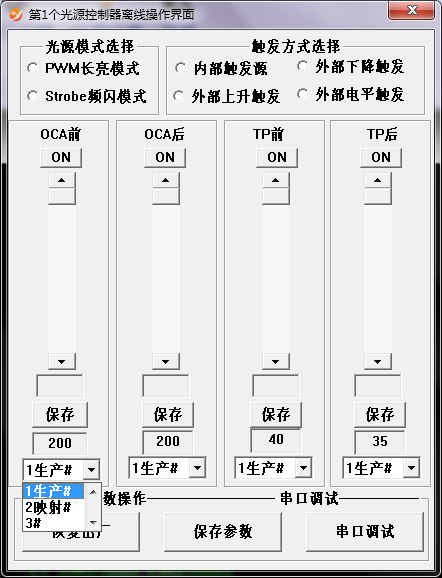
光源离线操作:点击该按钮后弹出“光源控制器离线操作界面”,如下图所示;
光源模式选择:
1. PWM常亮模式:选择这种模式光源就通过内部信号常亮或者常灭;
2. Strobe频闪模式:选择这种模式光源就通过相应外部信号或者内部信号进行频闪。
调节光源亮度:选择生产通道或者映射通道来进行保存对应通道亮度。
光源设置
运行参数
运行参数包括对位设置、高级参数设置、五点标定、补偿。

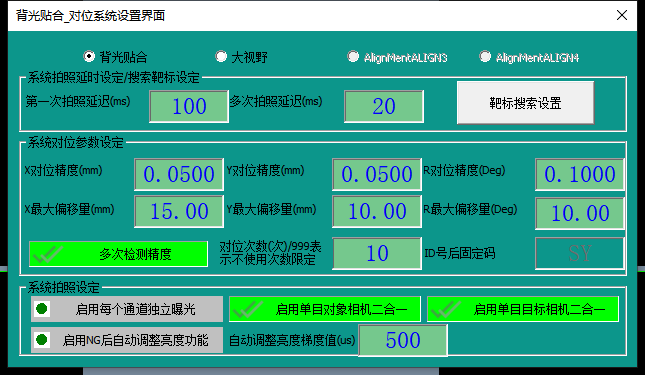
对位设置
拍照延时:生产过程中收到PLC/Robot发送拍照信号后,延时一段时间再执行拍照采集图像动作;
多次拍照延时:生产过程多次对位中收到PLC/Robot发送拍照信号后,延时一段时间再执行拍照采集图像动作;
XY对位精度:X方向/Y方向精度上限,即视觉当前对位X方向/Y方向偏移量判定值小于设定值才会输出对位OK;
R对位精度:角度精度上限,即视觉对位角度精度偏移量判定值小于设定值才会输出对位OK;
XY最大偏移量:对位过程中对位平台X方向/Y方向最大可以移动的距离;
R最大偏移量:对位过程中对位平台旋转方向最大可以移动的角度。
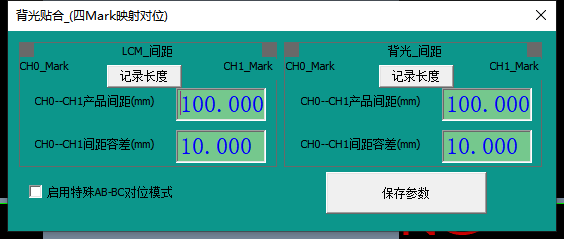
高级参数设置
对象产品:(对位平台上的产品)对位系统会对拍照通道的Mark点与Mark点距离进行测量,间距代表Mark点之间的距离,容差代表Mark点之间距离的容差。例如设定Mark点距离设定为100,容差设定为10,即对应通道Mark点距离不在90~110之间代表测试Mark距离超限,系统会输出距离超限报警。这样可以有效管控产品来料误差,提升对位精度;
记录长度:记录当前对象产品的mark点间距
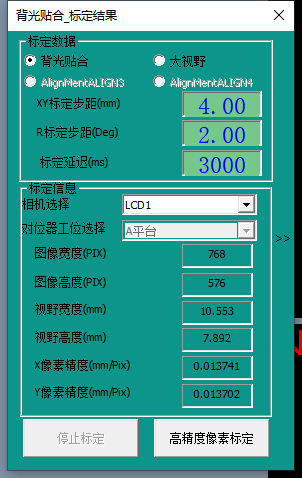
五点标定
相机选择:标定主要是针对拍摄对位平台上产品的图像通道;
图像宽度:标定通道相机长边方向像素分辨率;
图像高度:标定通道相机短边方向像素分辨率;
视野宽度:显示五点标定后标定通道相机视野长边方向长度;
视野高度:显示五点标定后标定通道相机视野短边方向长度;
X像素精度:标定通道相机长边方向像素精度 = 视野宽度/图像宽度;
Y像素精度:标定通道相机短边方向像素精度 = 视野高度/图像高度;
注释:标定计算出来的视野宽,高要和实际视野接近,否则标定结果就是错误的,另外X像素精度和Y像素精度要接近,否则标定结果就是错的。
点击启动标定后,控制UVW平台走偏移量完成相机标定
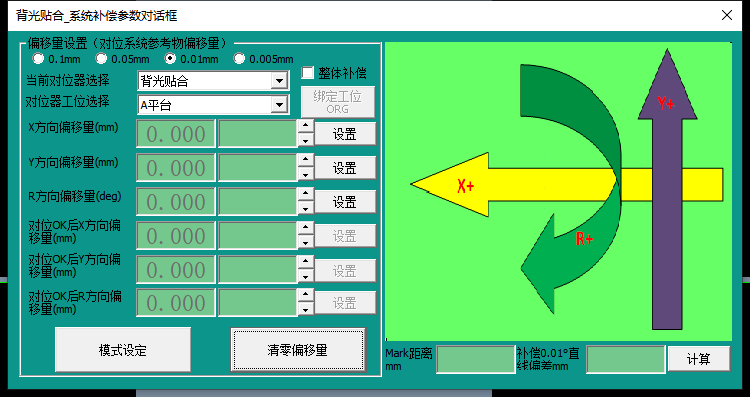
补偿
根据补偿方向图示,在右侧对应的方向补偿写入补偿数值后,点击“设置”累加到左侧的总补偿参数中。
清零偏移量,则会将累加的总和全部清零,同样需要点击“保存参数”,清零才能生效。
MasterAlign视觉背光贴合应用软件通讯版本,我们以MasterAlign_LTW介绍通讯部分知识,详情见文中所述:
MasterAlign_LTW(下文中简称为MA_LTW)为双翌自主研发的视觉对位系统应用软件,软件中的通讯日志可方便我们进行整个通讯流程的接收和查询流程进行分析,详情见文档所示:
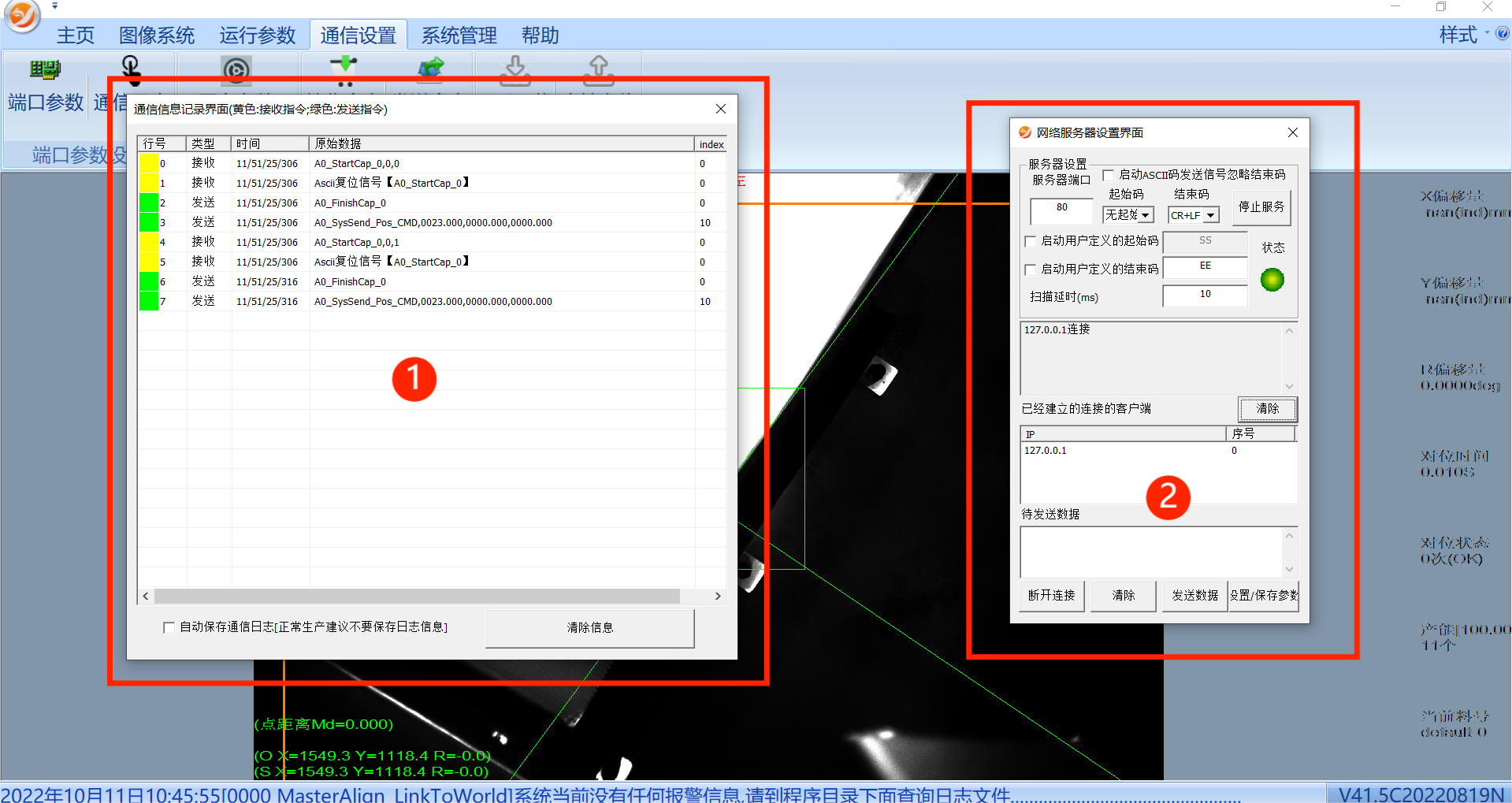
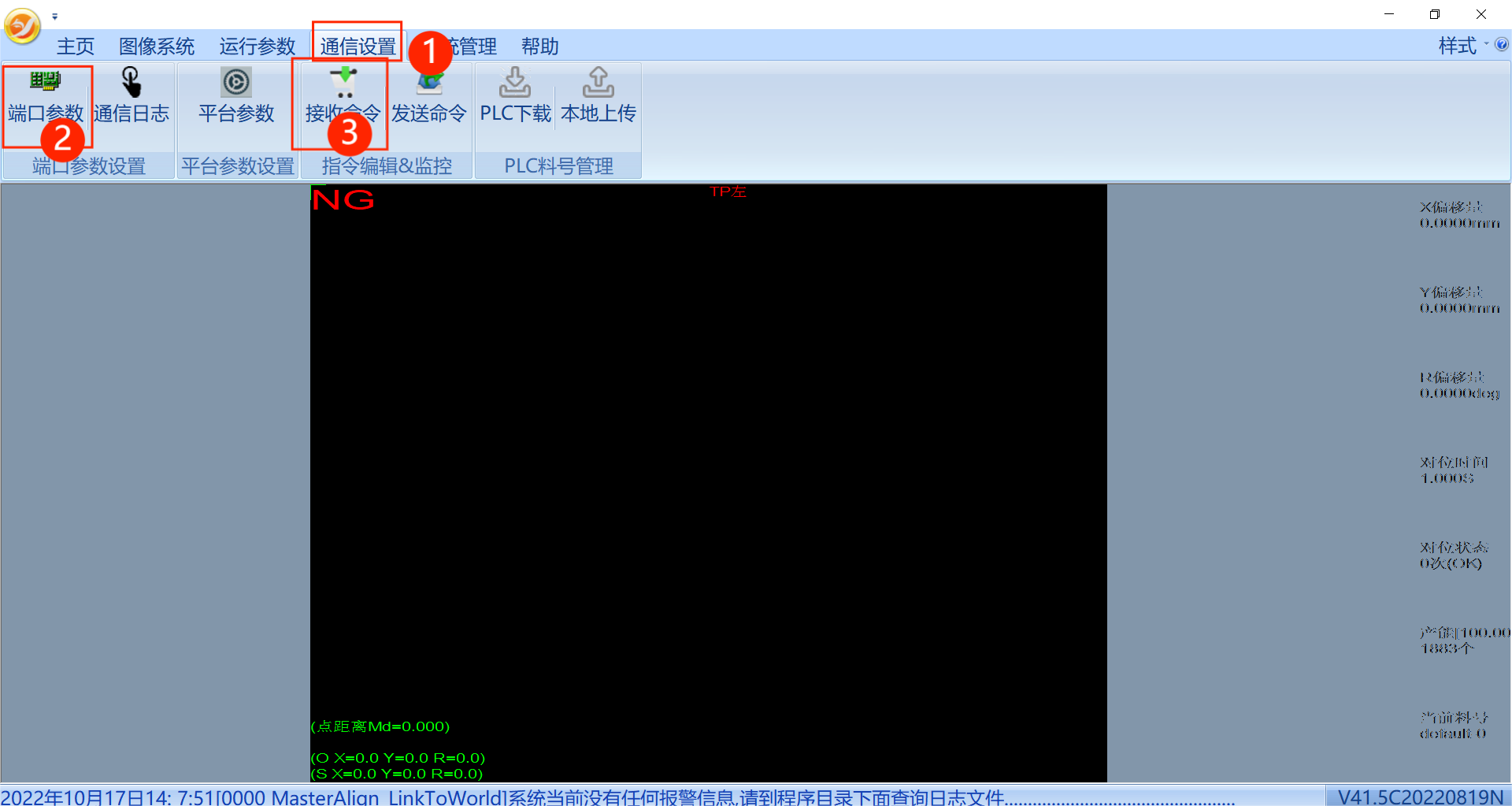
1、如何打开MA视觉对位系统通讯日志
Fig.1 打开通讯日志方法
点击图像中①进入到通讯设置界面,点击②③,分别打开通讯日志和端口参数界面
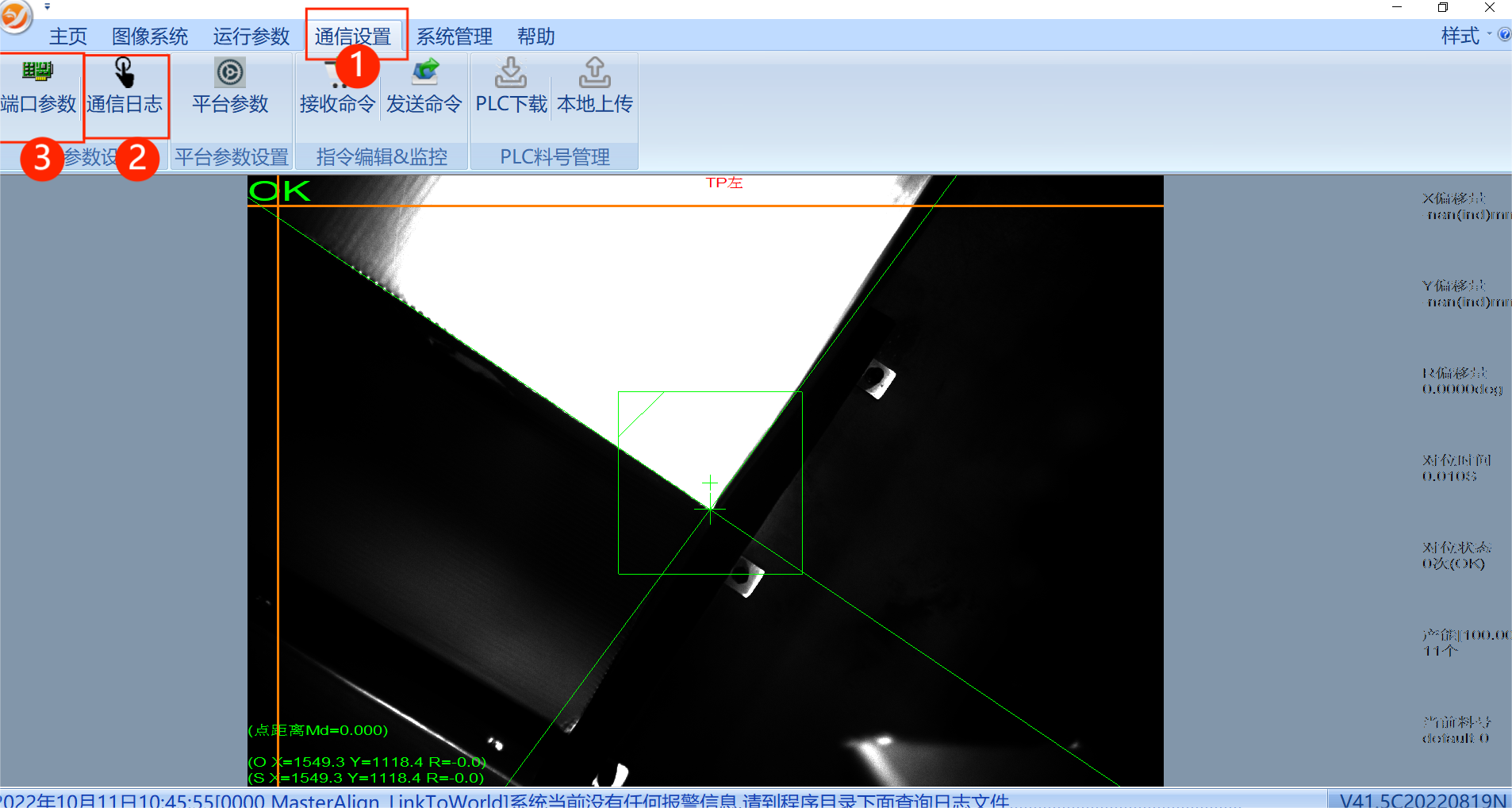
Fig.2 通讯日志和端口参数
下图中①是通讯日志,②是端口参数
2、如何通过MA视觉对位系统通讯日志查看流程运行时间
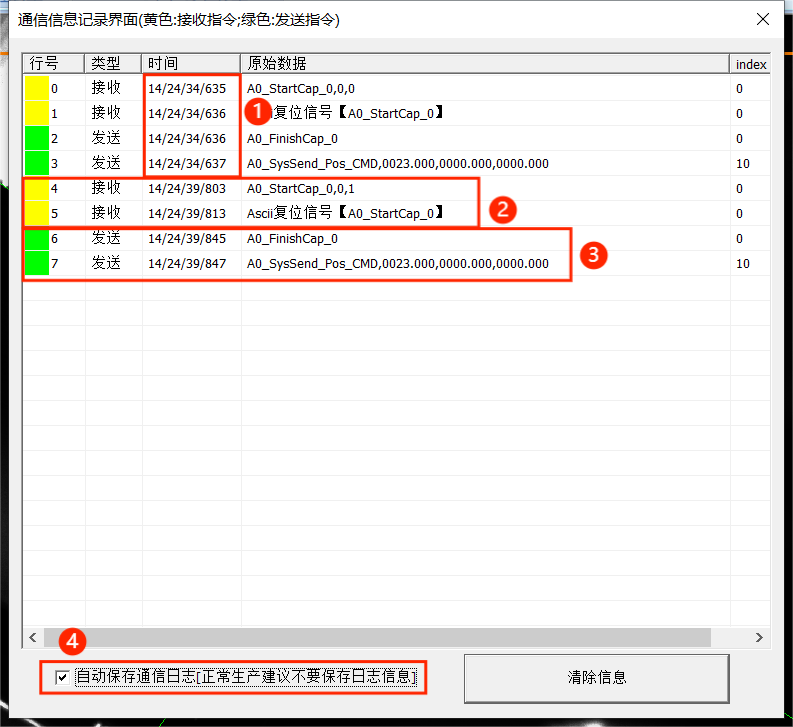
Fig.3 通讯日志界面
通讯日志:
①是一个流程的运行时间,由机器人发信号到视觉返回信号为一个通讯流程,时间是由时、分、秒、毫秒组成,例如图中14/24/34/635 就是14时24分34秒635毫秒
②黄色是接收,机器人发过给视觉的数据和信号
③绿色是发送,视觉返回给机器人的数据和信号
④自动保存通讯日志里面的所以数据,生成数据在文件夹里面的“SYCommunicateLogFile”文件夹里面,通过存储的日志文件可以看出发送的数据准不准确
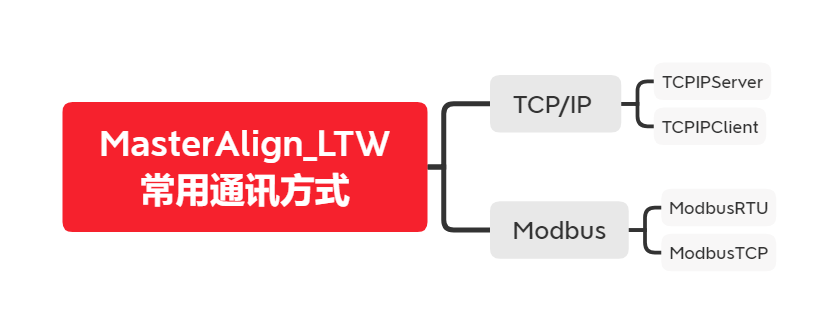
3、MA_LTW通讯方式
MA_LTW软件广泛应用于工业应用现场精密对位和精密装配场合中,常用的通讯方式如下所示:
MA_LTW配合过的PLC和机械手通讯见网站链接所示:https://www.shuangyi-tech.com/news_99.html
3.1 TCPIPServer
这是TCP网口连接通讯,需要设置IP,视觉软件做服务器
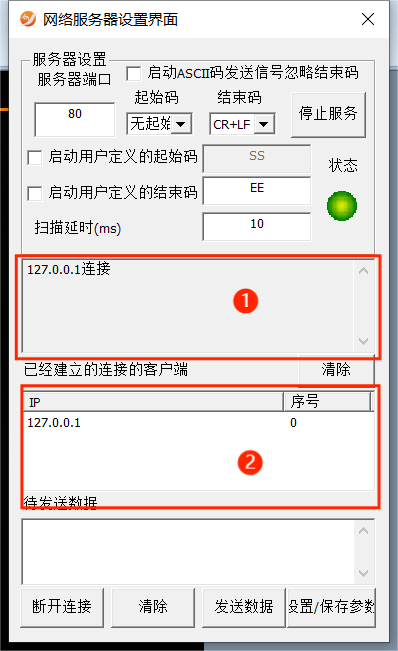
端口参数:①可以看到连接、断开、接收的数据
②可以确认通讯是否保持连接,连接通讯的个数
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改端口、参数后需要点击右下角“设置/保存参数”后再进行操作
3.2 TCPIPClient
TCP网口连接通讯,需要设置IP,视觉软件做客户端
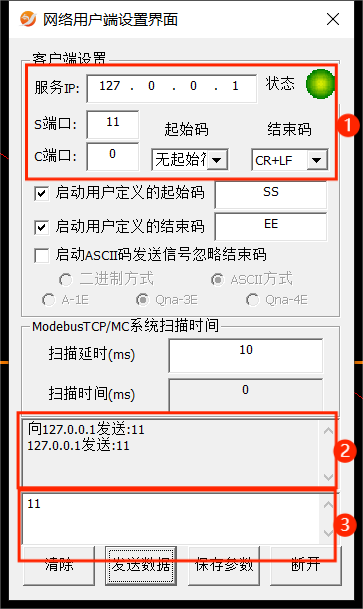
端口参数:②可以看到接收和发送的数据
③是手动发送给服务器的数据
S端口:服务器端口
C端口:本地端口
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改IP/端口、数据后需要点击下面的“保存参数”后再进行操作
3.3 ModbusRTU
Modbus串口通讯
点击①后打开端口参数②和接收命令③

①是串口号,要与PLC串口对上,②的设置要与PLC端口一致,③仅是代表端口是否打开,即使亮绿灯也不代表和PLC连接正常,修改①和②后要点击右下角“设置/保存参数”保存参数
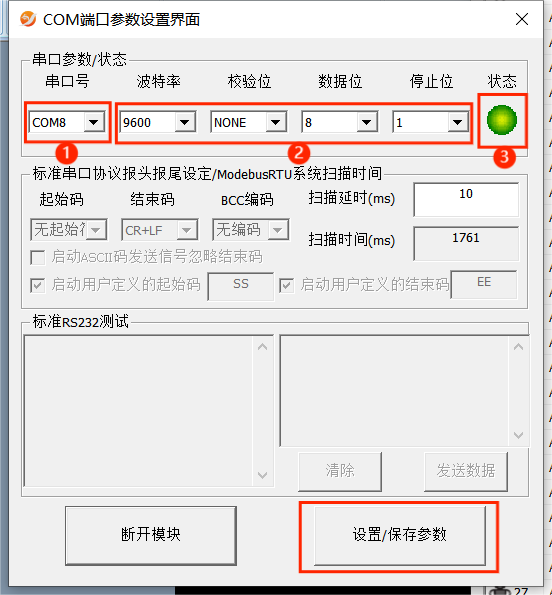
在①中可以看到PLC发送过来的数据
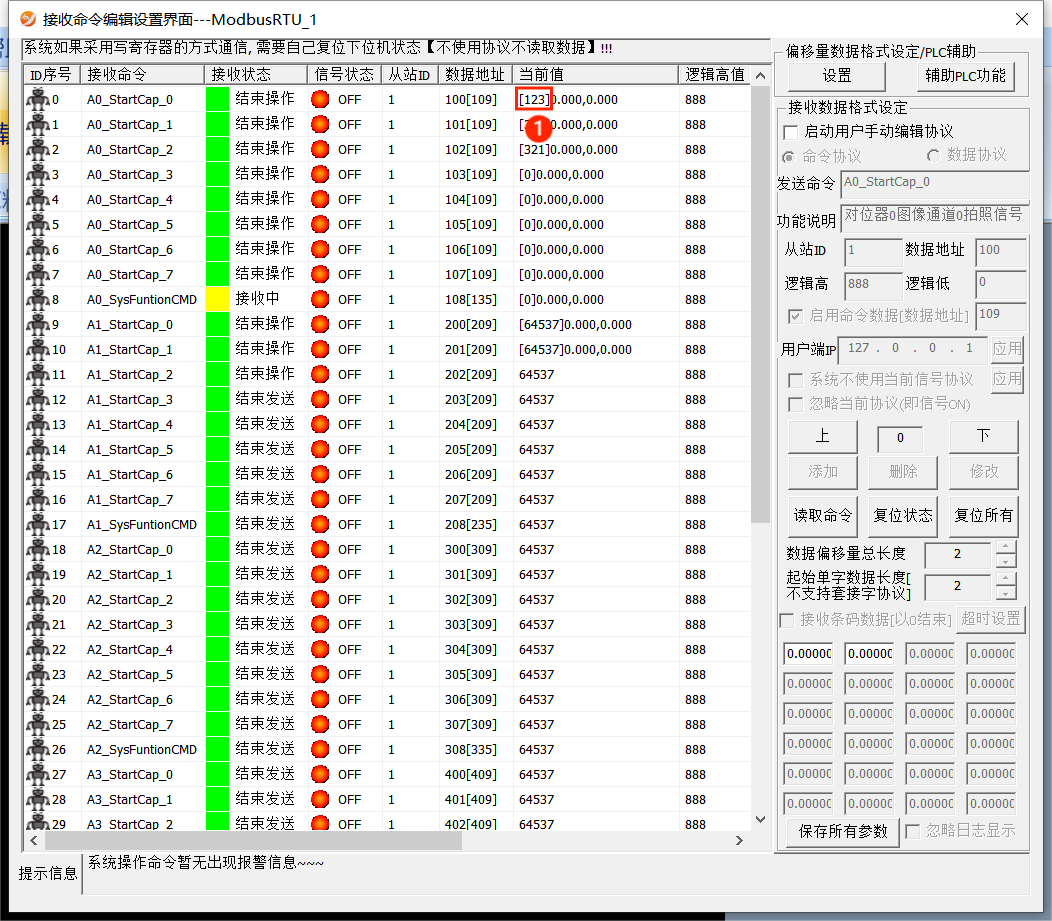
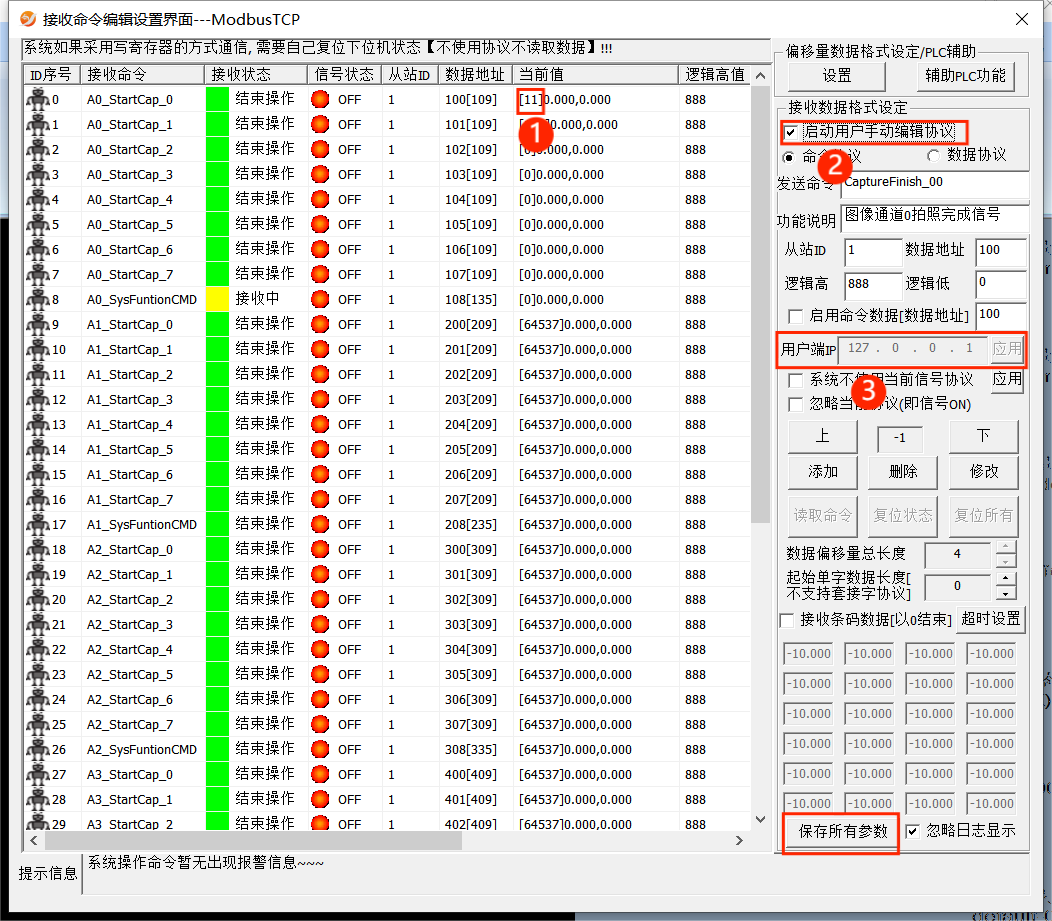
3.4 ModbusTCP
Modbus TCP通讯
点击①后打开端口参数②和接收命令③
连接通讯
在①里面修改IP和端口号,修改后须在②点击“保存参数”

①是PLC发送过来,视觉接收到的数据,点击②之后才能进行编辑右边的数据,要保证③IP地址和PLC的地址一样,修改后点击下面“保存所有参数”保存,然后点击②才可以退出
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
