热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


随着机器视觉技术的快速发展,传统很多需要人工来手动操作的工作,渐渐地被机器所替代。传统方法做目标识别大多都是靠人工实现,从形状、颜色、长度、宽度、长宽比来确定被识别的目标是否符合标准,最终定义出一系列的规则来进行目标识别。这样的方法当然在一些简单的案例中已经应用的很好,唯一的缺点是随着被识别物体的变动,所有的规则和算法都要重新设计和开发,即使是同样的产品,不同批次的变化都会造成不能重用的现实。
而随着机器学习,深度学习的发展,很多肉眼很难去直接量化的特征,深度学习可以自动学习这些特征,这就是深度学习带给我们的优点和前所未有的吸引力。很多特征我们通过传统算法无法量化,或者说很难去做到的,深度学习可以。特别是在图像分类、目标识别这些问题上有显著的提升。
视觉常用的目标识别方法有三种:Blob分析法(BlobAnalysis)、模板匹配法、深度学习法。下面就三种常用的目标识别方法进行对比。
Blob分析法(BlobAnalysis)
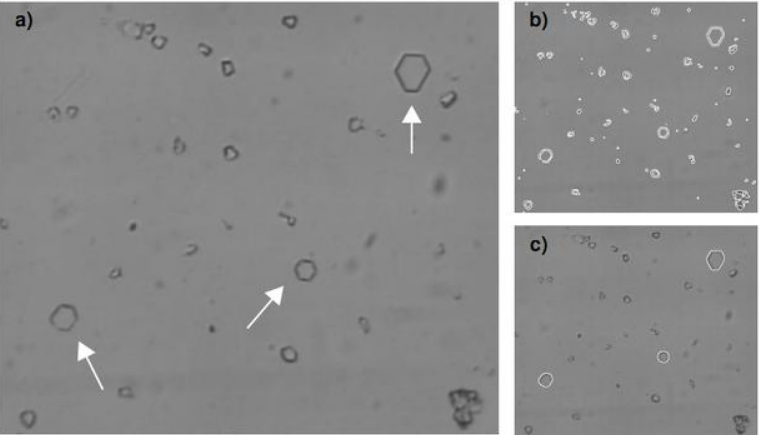
在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像;2.必要的图像特征不能用2个灰度级描述;3.按照模版检测(图形检测需求)。
总的来说,Blob分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
模板匹配法
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。它是图像处理中最基本、最常用的匹配方法。换句话说就是一副已知的需要匹配的小图像,在一副大图像中搜寻目标,已知该图中有要找的目标,且该目标同模板有相同的尺寸、方向和图像元素,通过统计计算图像的均值、梯度、距离、方差等特征可以在图中找到目标,确定其坐标位置。
这就说明,我们要找的模板是图像里标标准准存在的,这里说的标标准准,就是说,一旦图像或者模板发生变化,比如旋转,修改某几个像素,图像翻转等操作之后,我们就无法进行匹配了,这也是这个算法的弊端。
所以这种匹配算法,就是在待检测图像上,从左到右,从上向下对模板图像与小东西的图像进行比对。
在opencv中有cv2.matchTemplate(src,templ,result,match_method)方法可以调用,src是待检测图像,templ是模板库,match_method是匹配的方法。 这种方法相比Blob分析有较好的检测精度,同时也能区分不同的缺陷类别,这相当于是一种搜索算法,在待检测图像上根据不同roi用指定的匹配方法与模板库中的所有图像进行搜索匹配,要求缺陷的形状、大小、方法都有较高的一致性,因此想要获得可用的检测精度需要构建较完善的模板库。
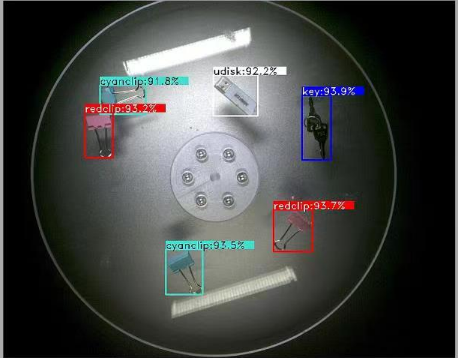
深度学习法
2014年R-CNN的提出,使得基于CNN的目标检测算法逐渐成为主流。深度学习的应用,使检测精度和检测速度都获得了改善。
自从AlexNet在比赛中使用卷积神经网络进而大幅度提高了图像分类的准确率,便有学者尝试将深度学习应用到目标类别检测中。卷积神经网络不仅能够提取更高层、表达能力更好的特征,还能在同一个模型中完成对于特征的提取、选择和分类。
在这方面,主要有两类主流的算法:
一类是结合RPN网络的,基于分类的R-CNN系列两阶目标检测算法(twostage);
另一类则是将目标检测转换为回归问题的一阶目标检测算法(singlestage)。
物体检测的任务是找出图像或视频中的感兴趣物体,同时检测出它们的位置和大小,是机器视觉领域的核心问题之一。
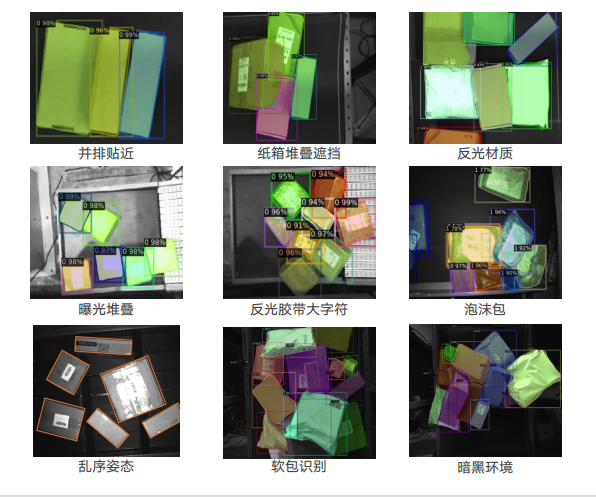
物体检测过程中有很多不确定因素,如图像中物体数量不确定,物体有不同的外观、形状、姿态,加之物体成像时会有光照、遮挡等因素的干扰,导致检测算法有一定的难度。进入深度学习时代以来,物体检测发展主要集中在两个方向:twostage算法如R-CNN系列和onestage算法如YOLO、SSD等。两者的主要区别在于twostage算法需要先生成proposal(一个有可能包含待检物体的预选框),然后进行细粒度的物体检测。而onestage算法会直接在网络中提取特征来预测物体分类和位置。
深圳市双翌光电科技有限公司是一家以机器视觉为技术核心,自主技术研究与应用拓展为导向的高科技企业。公司自成立以来不断创新,在智能自动化领域研发出视觉对位系统、机械手视觉定位、视觉检测、图像处理库等为核心的20多款自主知识产权产品。涉及自动贴合机、丝印机、曝光机、叠片机、贴片机、智能检测、智能镭射等众多行业领域。双翌视觉系统最高生产精度可达um级别,图像处理精准、速度快,将智能自动化制造行业的生产水平提升到一个更高的层次,改进了以往落后的生产流程,得到广大用户的认可与肯定。随着智能自动化生产的普及与发展,双翌将为广大生产行业带来更全面、更精细、更智能化的技术及服务。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
