热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


MasterAlign全景视觉点胶应用软件
MasterAlign全景视觉点胶应用软件提供一种全景视觉引导点胶的智能合机器视觉图像处理方法,提供建模工具,快速提取图像中的待处理物件边缘点像素坐标信息。并结合视觉与点胶运动执行结构的标定,转换为机械坐标信息,从而实现快速的产品换型,引导执行机构进行加工点胶等,大大提高的生产效能。
MasterAlign全景视觉点胶应用软件采用视觉引导点胶,与现有的技术方法相比,利用视觉引导点胶及利用建模工具,加快了产品边缘点像素获取并转换成执行机构坐标,减少换型消耗的时间。利用建模工具的亚像素提取轮廓能力,提高了待处理产品的位置精度。本方法已于实际生产加工流程中发挥其有效的作用。
1、 全景定位物料,减少产品换型带来繁琐操作的困扰;
2、 快速兼容产品轮廓,引导机械手精准对物料点胶;
3、 全景视觉点胶应用于不同行业的物料点胶应用。
MasterAlign视觉点胶引导应用软件应用案例
MasterAlign视觉点胶引导应用软件配合机械手案例(多目标带角度点胶)
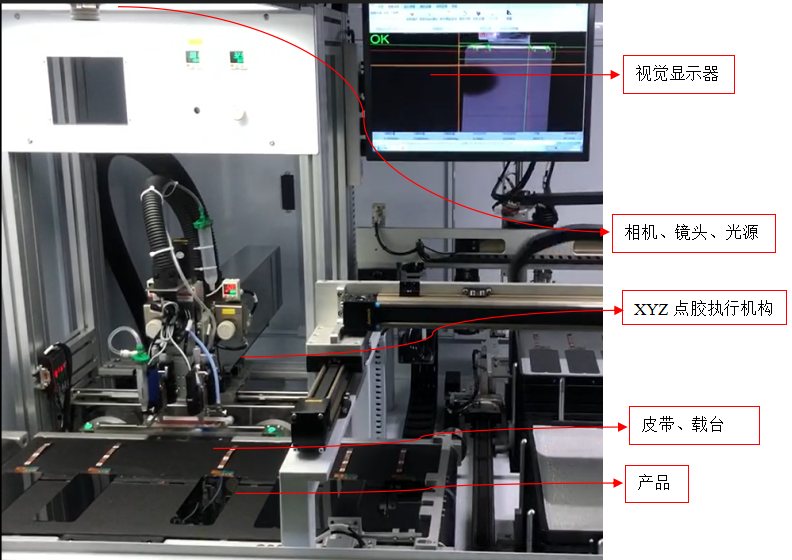
系统架构
视觉定位系统采用打正向光方式,光源在机械手上方,CCD从上往下拍摄,进行图像分析定位。相机将计算出的像素坐标转换为点胶执行机构的物理坐标,视觉软件与机械手进行网口通讯,将视野内物料的物理坐标发送给点胶执行机构,点胶执行机构将胶体准确的点到产品上。

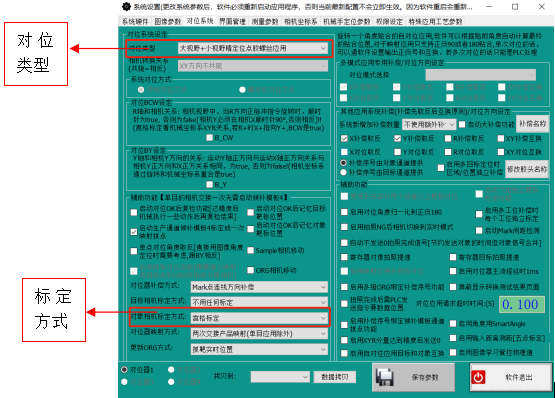
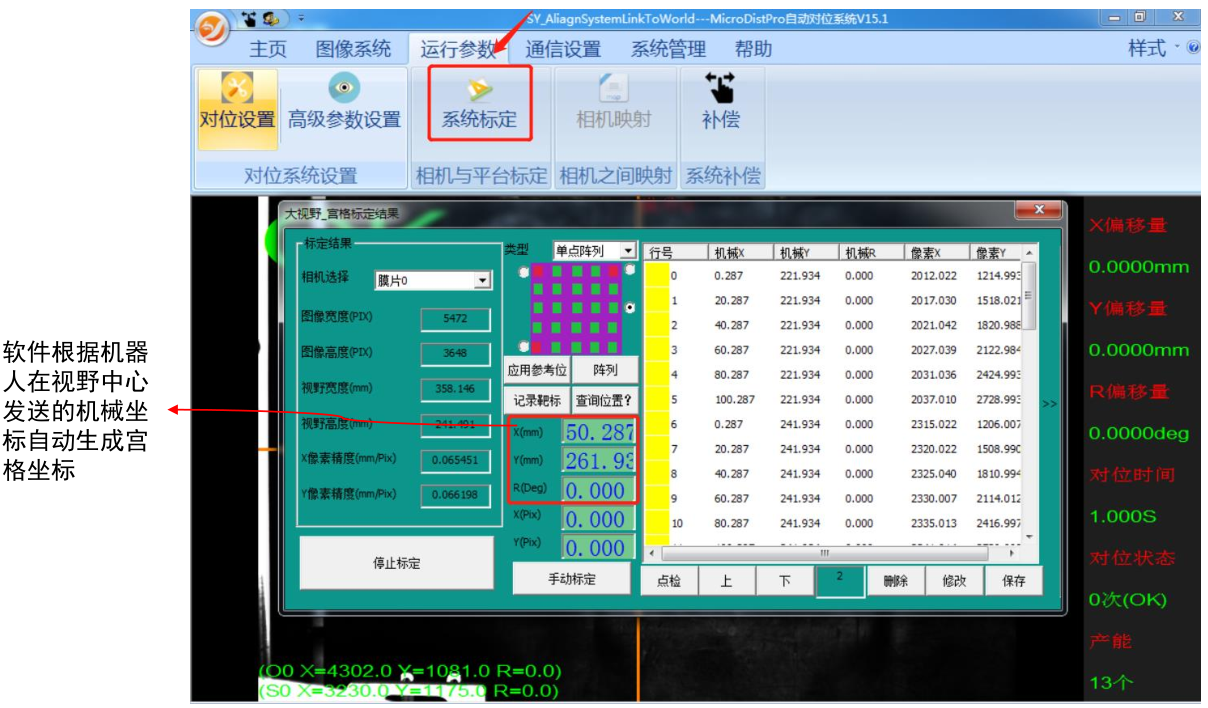
系统采用宫格标定,自定义行列数和间距及旋转角度,通过机械手发送的当前机械坐标,视觉软件自动计算出宫格机械坐标,视觉软件与机械手进行网口通讯,机械手吸取物料到达指定的机械坐标,相机拍摄物料计算出像素坐标和机械坐标的关系。
系统配置
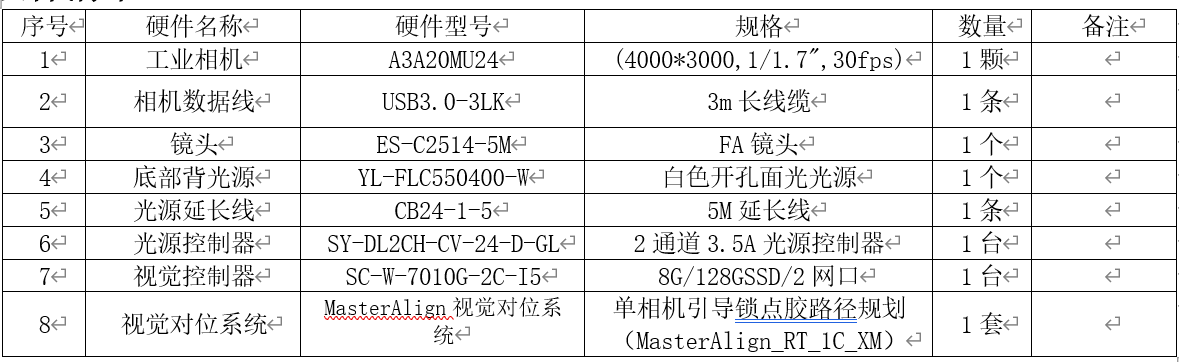
系统配置清单
设置软件配置
设置软件配置-基础参数
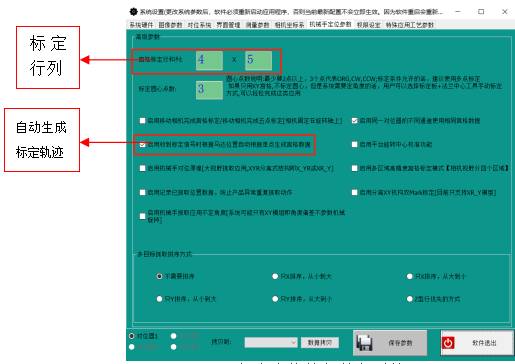
标定宫格的行数和列数
软件操作介绍
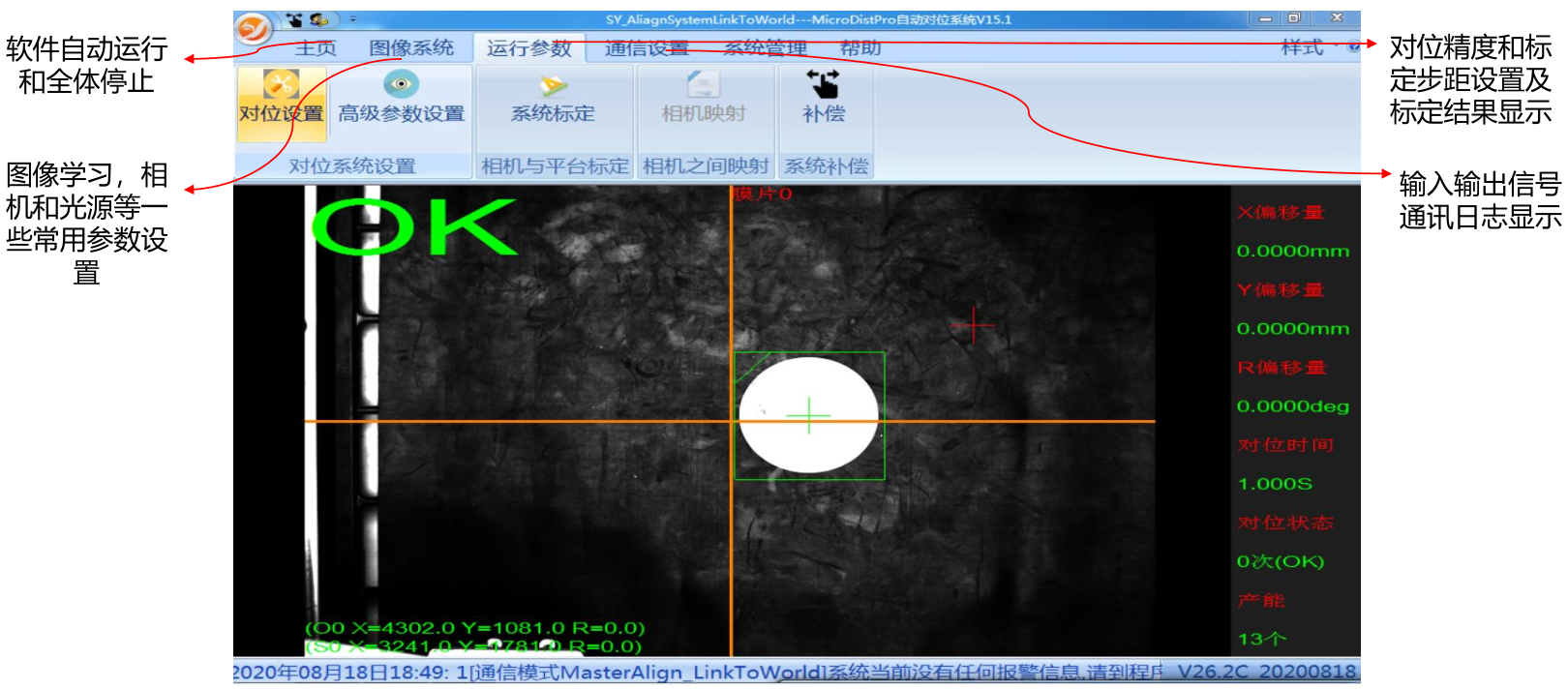
软件主页
说明:只要相机位置有移动必须要进行标定
系统标定(机械手根据宫格坐标走位置,相机对产品进行每个位置拍照)
高级参数设置(点胶路径规划)
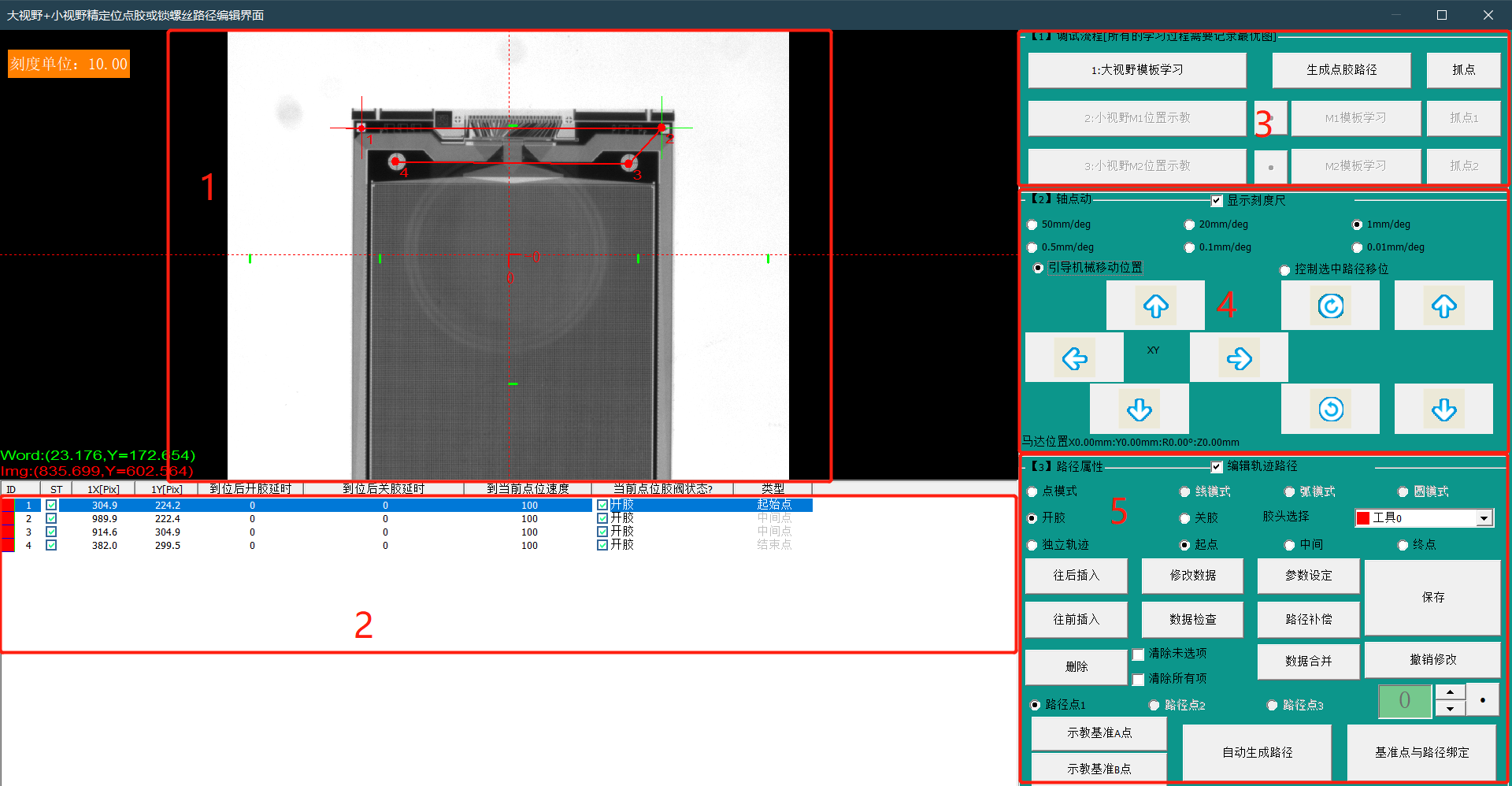
1:图像、胶路显示
2:胶路点位、参数。
3:调试按钮。
4:点胶轴JOG、点胶点位JOG。
5:胶路编辑。
参数设定(胶头示教以及点胶参数设置)
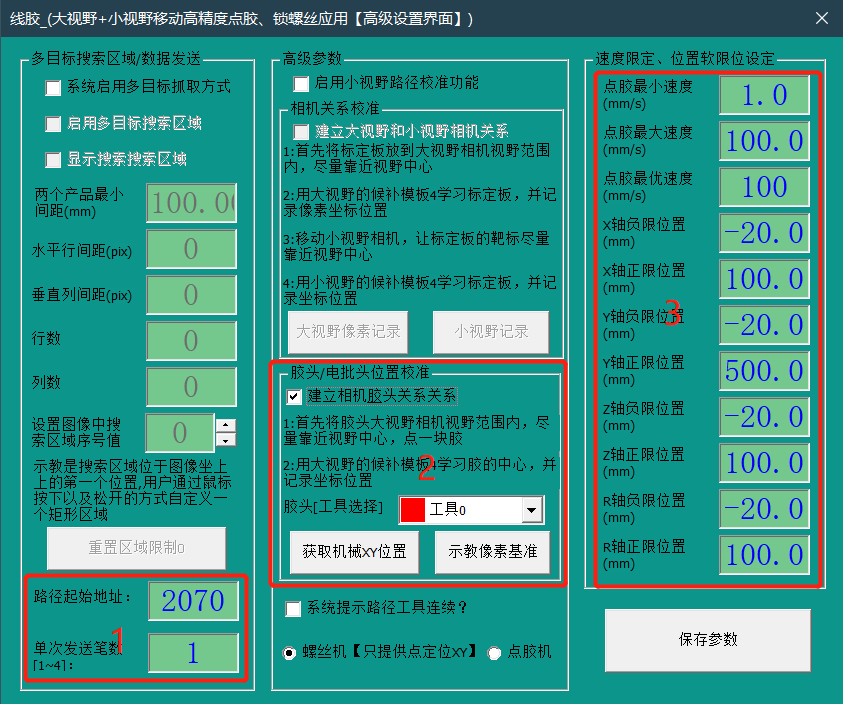
1:寄存器与胶路的关系:可根据PLC寄存器的设置调整胶路数据地址。
2:点教头示教:示教点教头与视觉图像的关系
3:速度、限位设定:设置点胶速度、点胶相关轴的软极限
说明:更换胶头必须要示教胶头位置
模板制作
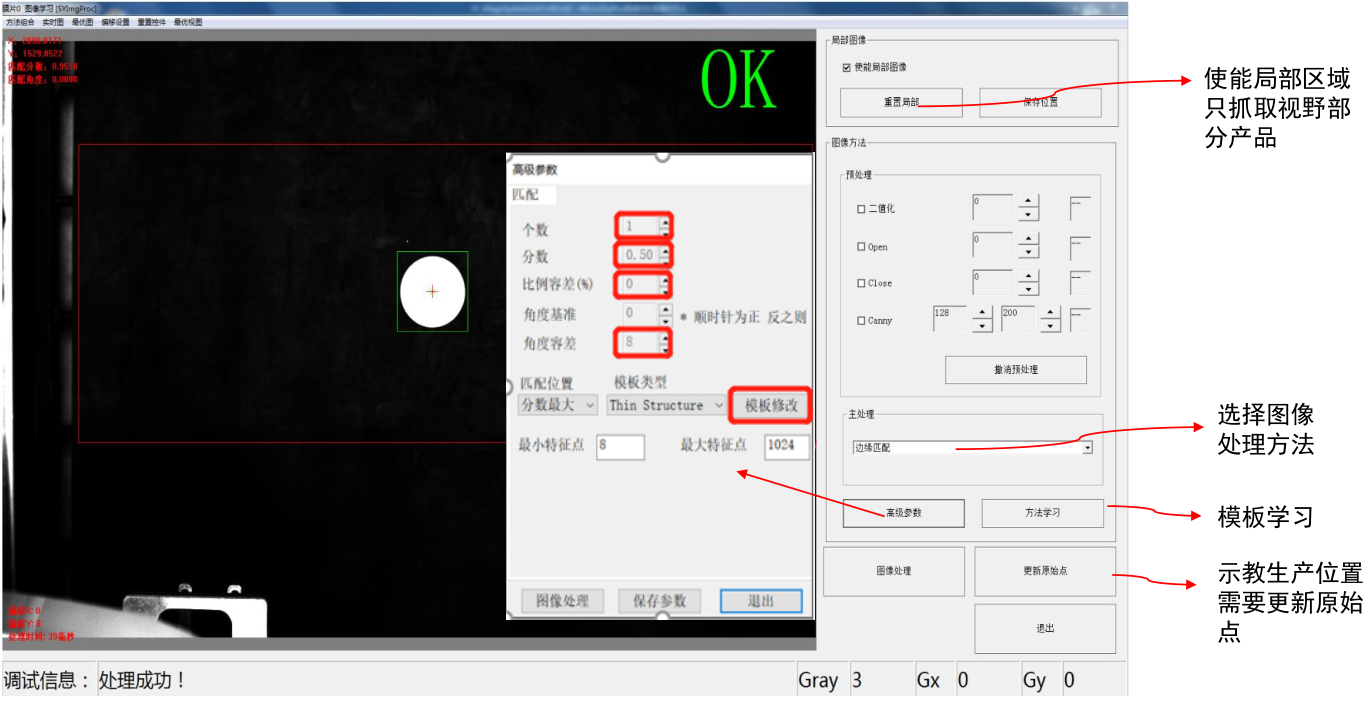
进入高级参数界面设置相关参数:
个数:查找产品的个数。
分数:和学习目标模板分数的相似度,建议分数0.5左右。 比例容差:学习的目标模板和查找产品的大小比例,建议0至2 左右。
角度容差:允许来料产品角度变化的范围正负值,超出设置的此范围则匹配模板失败。
模板修改:腌膜,剔除模板干扰点。
MasterAlign视觉点胶应用软件通讯版本,我们以MasterAlign_LTW介绍通讯部分知识,详情见文中所述:
MasterAlign_LTW(下文中简称为MA_LTW)为双翌自主研发的视觉对位系统应用软件,软件中的通讯日志可方便我们进行整个通讯流程的接收和查询流程进行分析,详情见文档所示:
1、如何打开MA视觉对位系统通讯日志
Fig.1 打开通讯日志方法
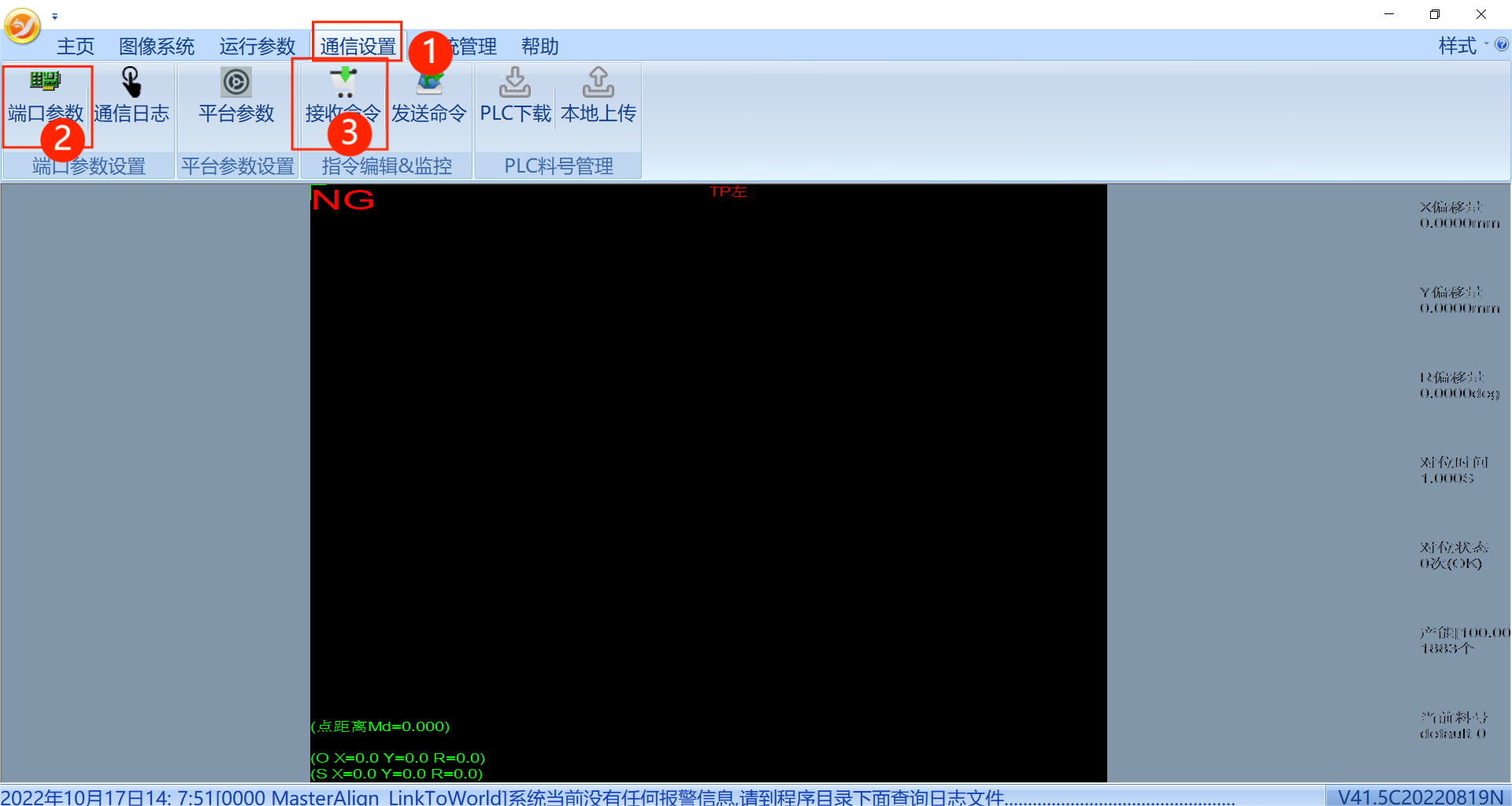
点击图像中①进入到通讯设置界面,点击②③,分别打开通讯日志和端口参数界面
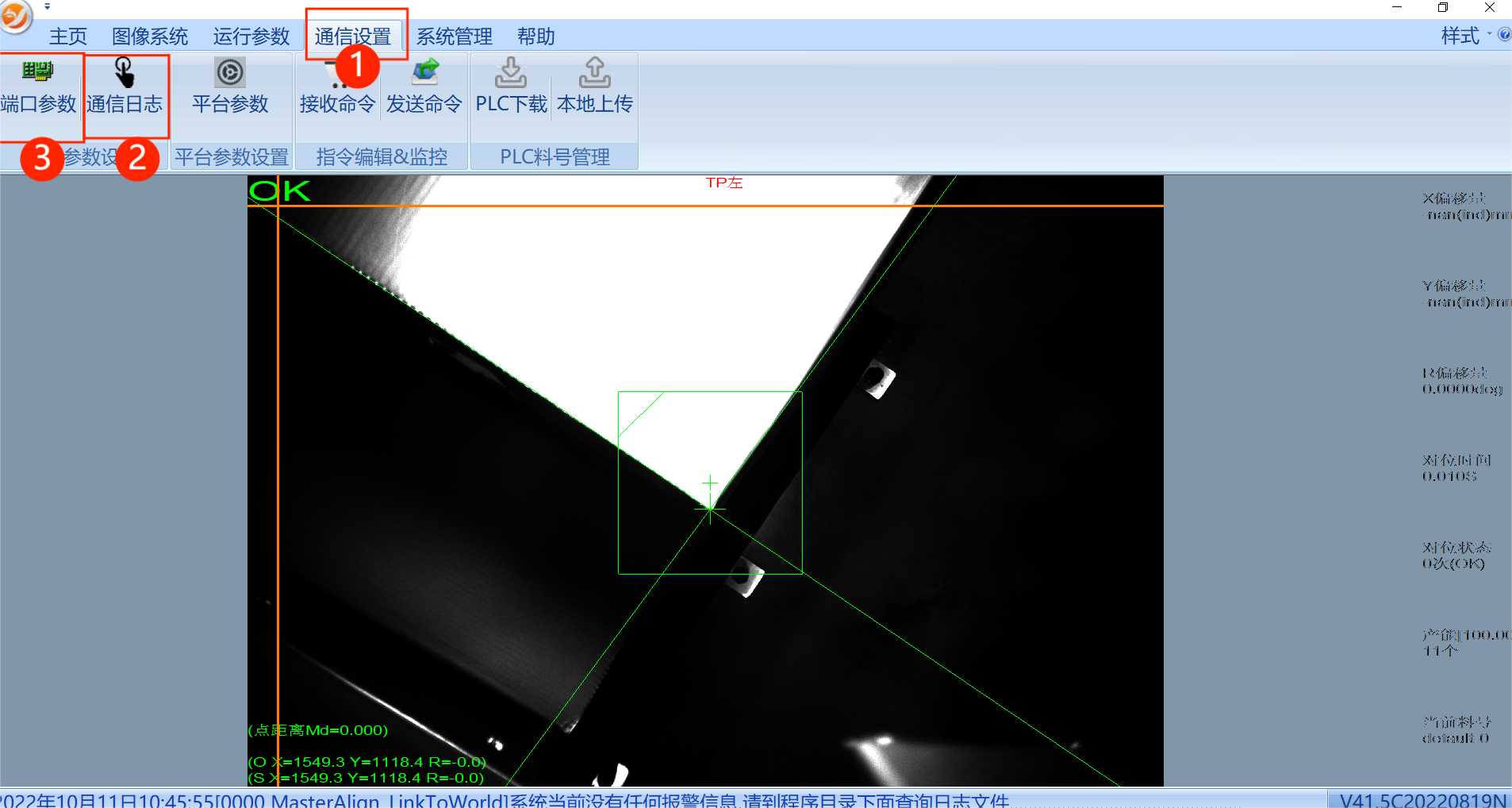
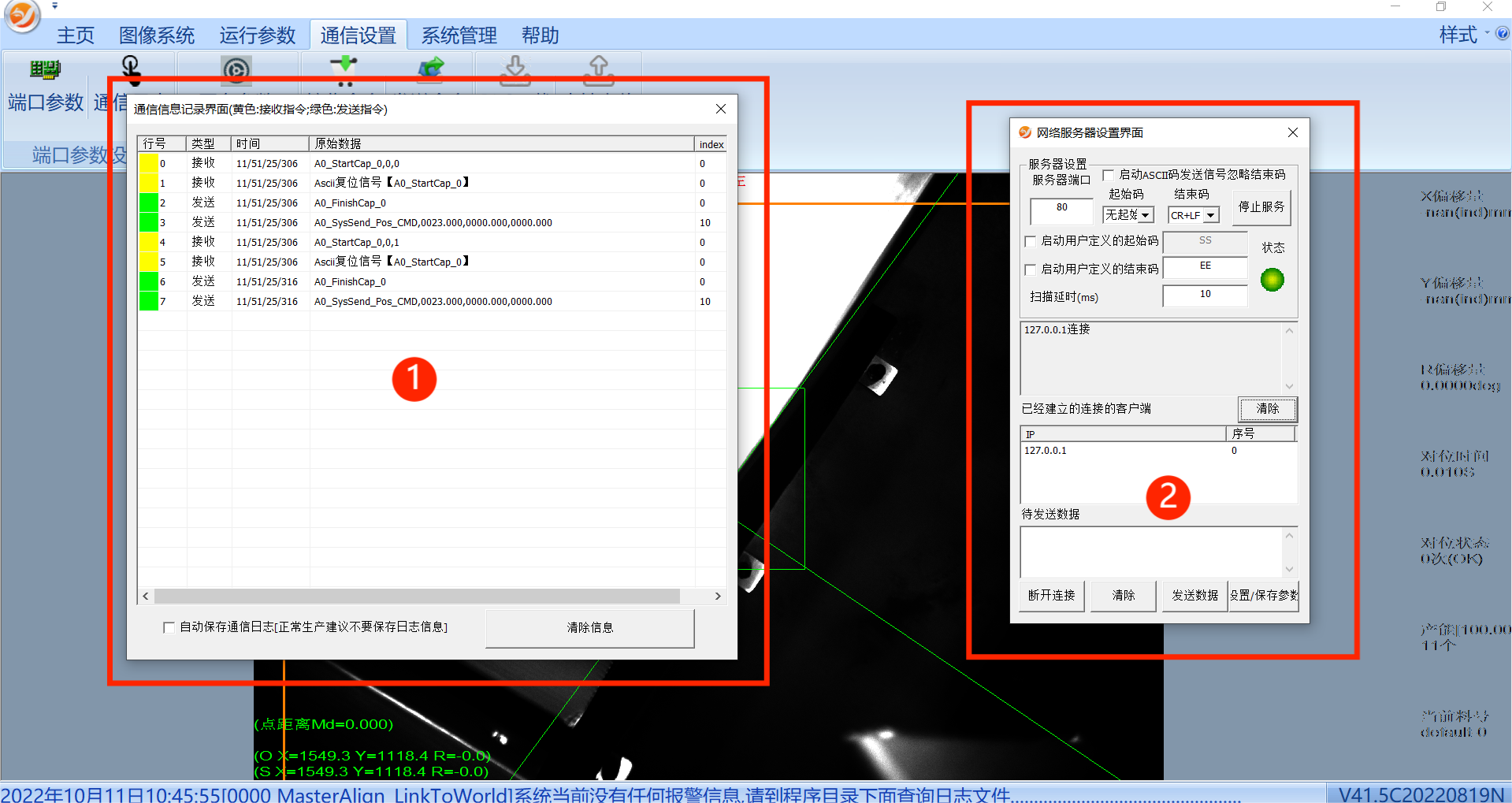
Fig.2 通讯日志和端口参数
下图中①是通讯日志,②是端口参数
2、如何通过MA视觉对位系统通讯日志查看流程运行时间
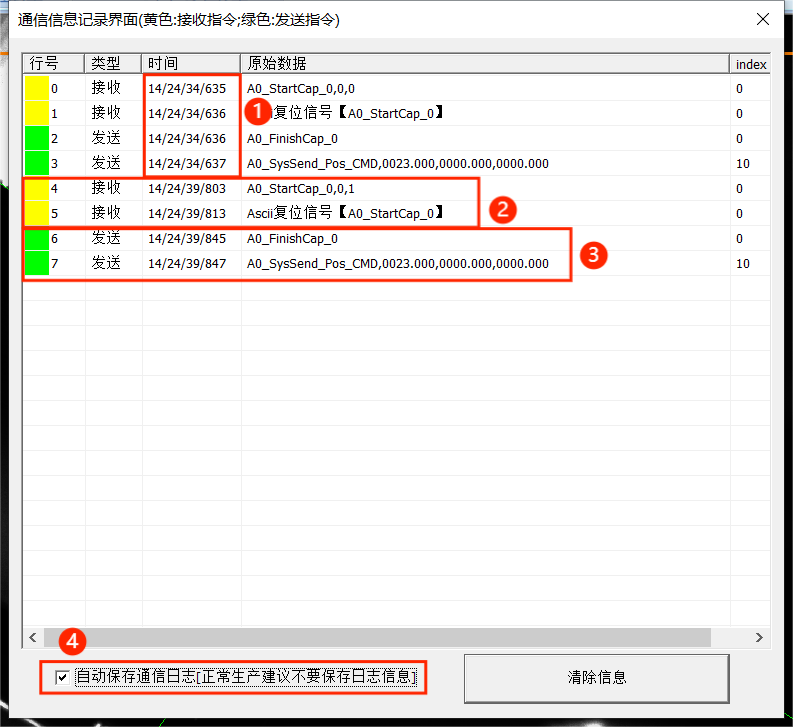
Fig.3 通讯日志界面
通讯日志:
①是一个流程的运行时间,由机器人发信号到视觉返回信号为一个通讯流程,时间是由时、分、秒、毫秒组成,例如图中14/24/34/635 就是14时24分34秒635毫秒
②黄色是接收,机器人发过给视觉的数据和信号
③绿色是发送,视觉返回给机器人的数据和信号
④自动保存通讯日志里面的所以数据,生成数据在文件夹里面的“SYCommunicateLogFile”文件夹里面,通过存储的日志文件可以看出发送的数据准不准确
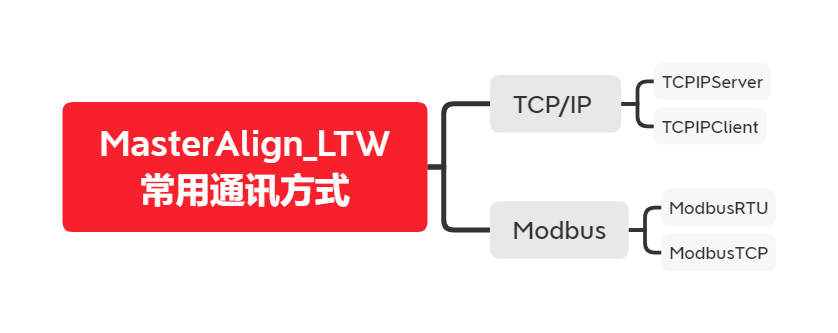
3、MA_LTW通讯方式
MA_LTW软件广泛应用于工业应用现场精密对位和精密装配场合中,常用的通讯方式如下所示:
MA_LTW配合过的PLC和机械手通讯见网站链接所示:https://www.shuangyi-tech.com/news_99.html
3.1 TCPIPServer
这是TCP网口连接通讯,需要设置IP,视觉软件做服务器
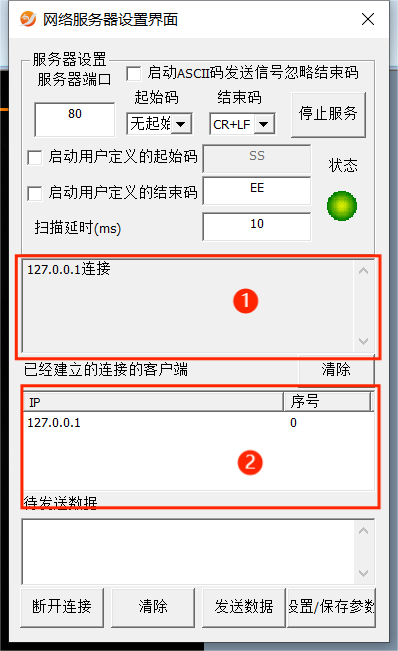
端口参数:①可以看到连接、断开、接收的数据
②可以确认通讯是否保持连接,连接通讯的个数
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改端口、参数后需要点击右下角“设置/保存参数”后再进行操作
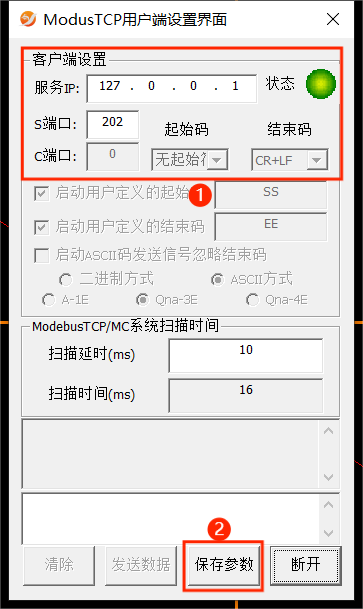
3.2 TCPIPClient
TCP网口连接通讯,需要设置IP,视觉软件做客户端
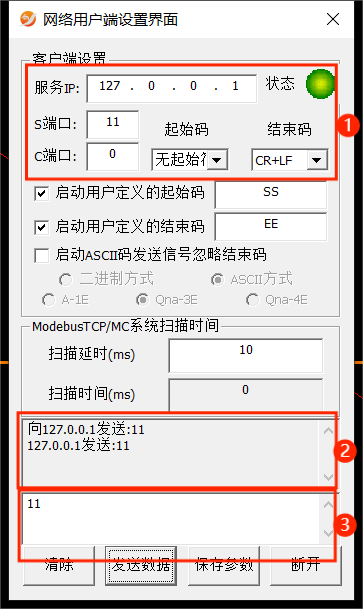
端口参数:②可以看到接收和发送的数据
③是手动发送给服务器的数据
S端口:服务器端口
C端口:本地端口
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改IP/端口、数据后需要点击下面的“保存参数”后再进行操作
3.3 ModbusRTU
Modbus串口通讯
点击①后打开端口参数②和接收命令③
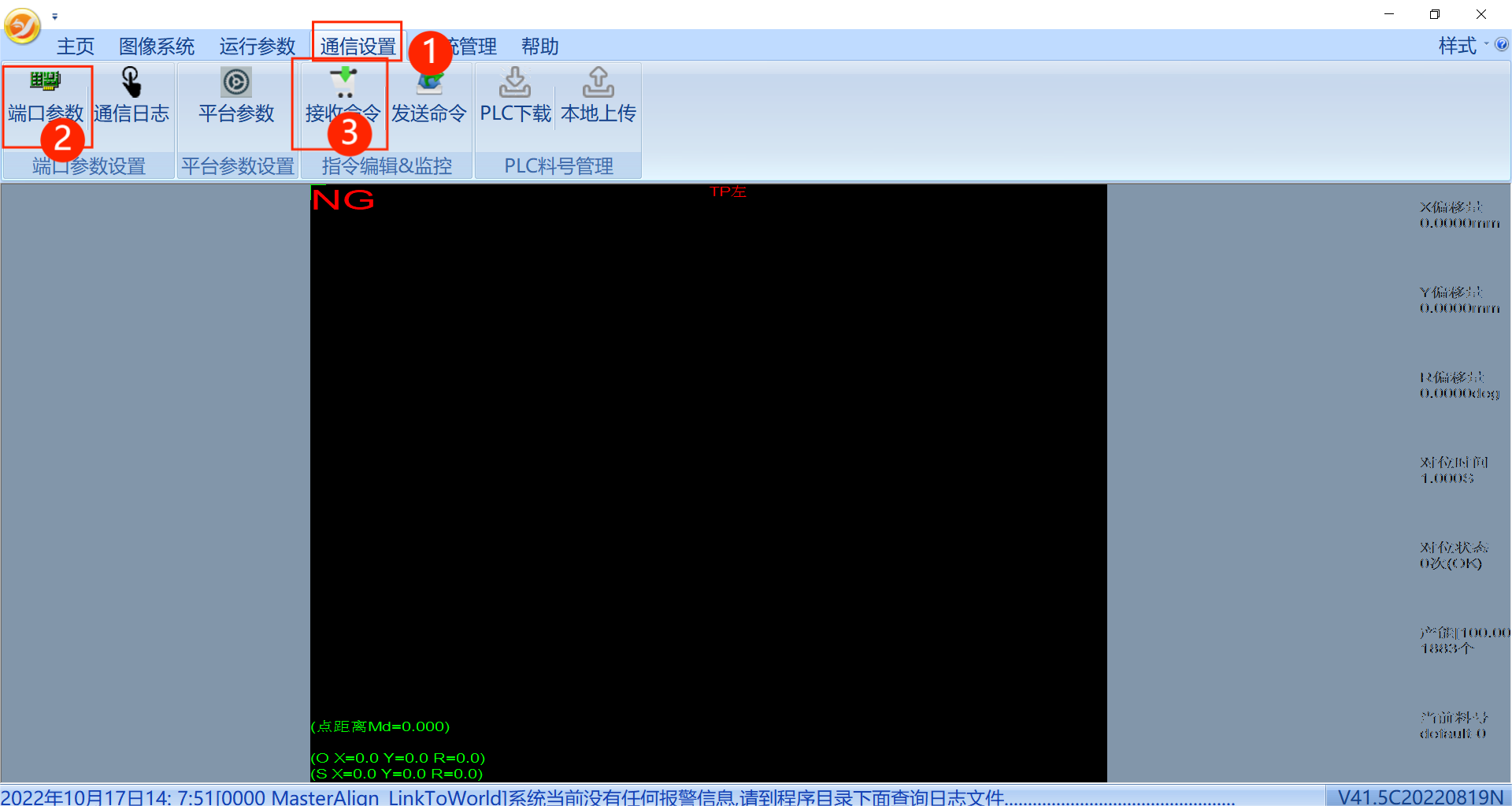
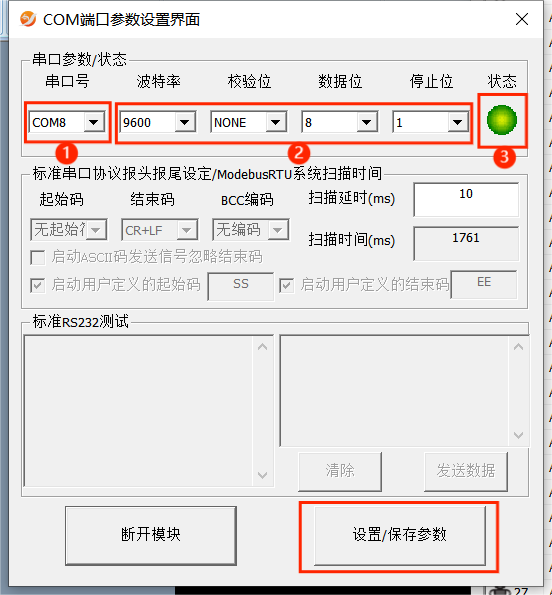
①是串口号,要与PLC串口对上,②的设置要与PLC端口一致,③仅是代表端口是否打开,即使亮绿灯也不代表和PLC连接正常,修改①和②后要点击右下角“设置/保存参数”保存参数
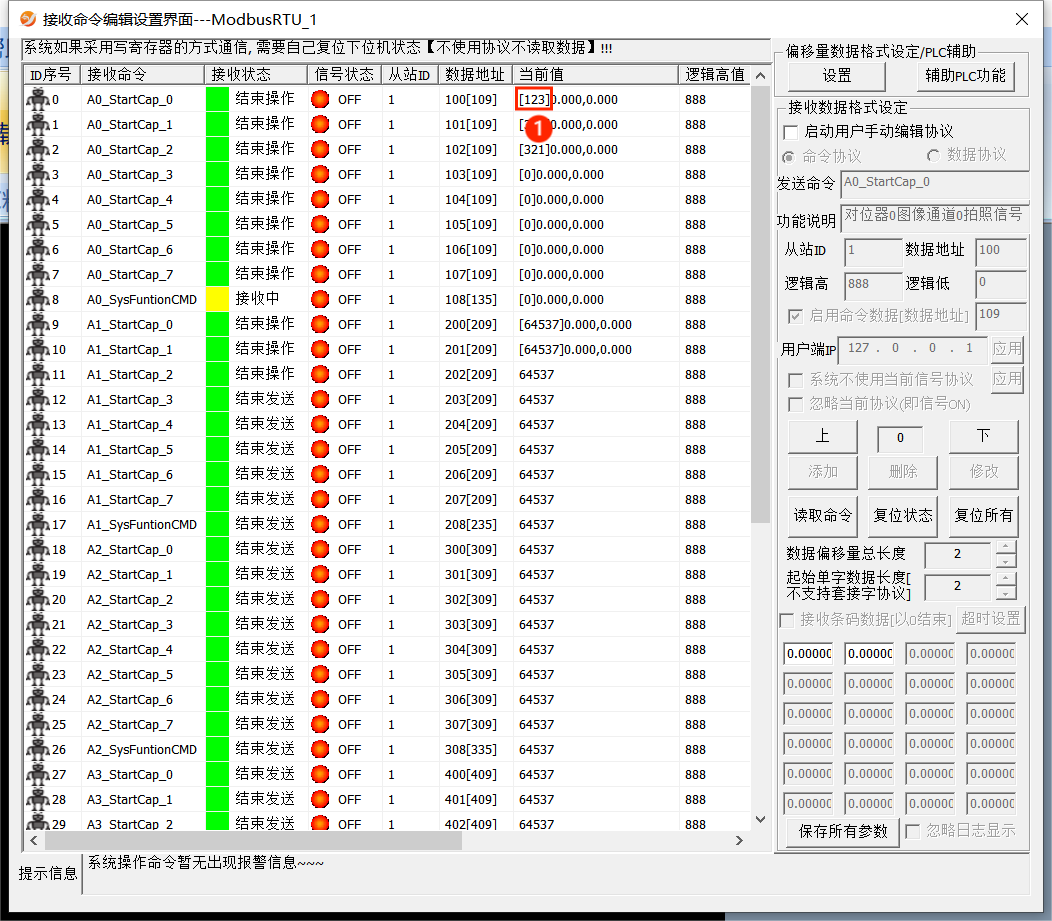
在①中可以看到PLC发送过来的数据
3.4 ModbusTCP
Modbus TCP通讯
点击①后打开端口参数②和接收命令③
连接通讯
在①里面修改IP和端口号,修改后须在②点击“保存参数”
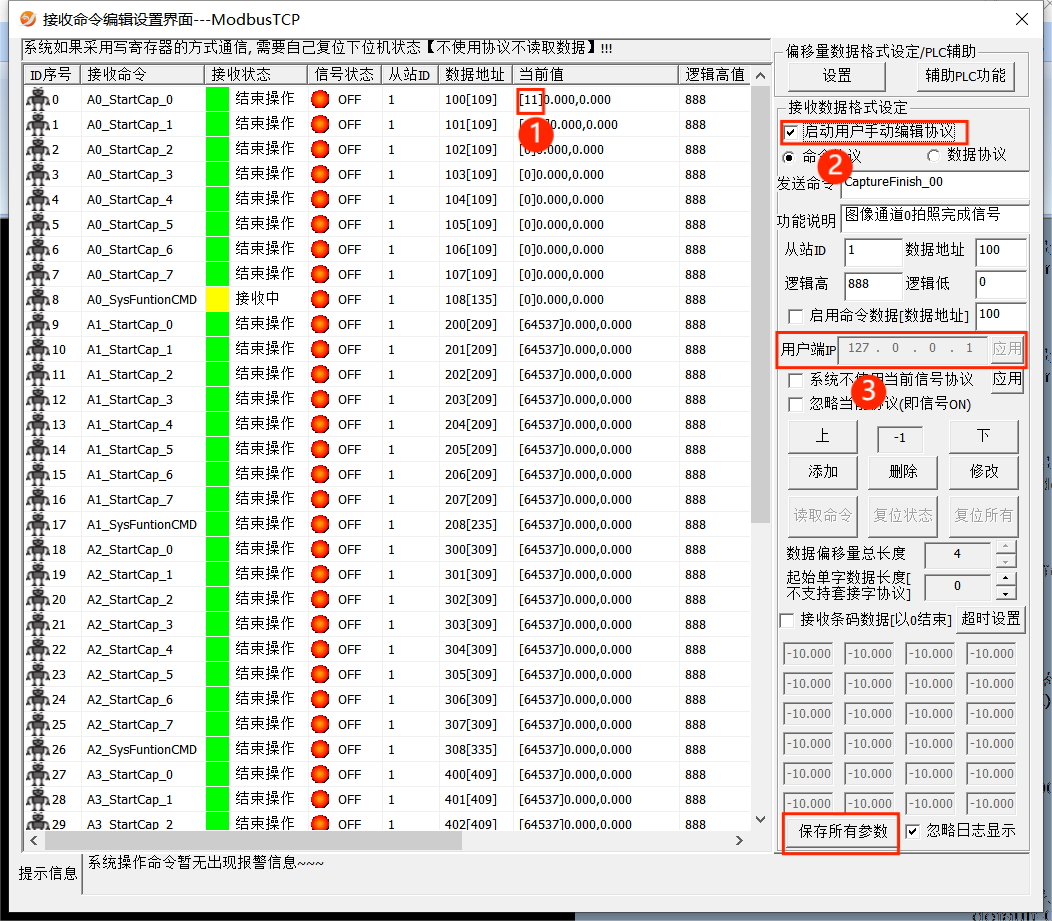
①是PLC发送过来,视觉接收到的数据,点击②之后才能进行编辑右边的数据,要保证③IP地址和PLC的地址一样,修改后点击下面“保存所有参数”保存,然后点击②才可以退出
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
