

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
采用二维数字滤波方法来进行图像处理,如采用高通滤波器有助于突出边缘轮廓和图像细节部分,而用低通滤波器可以减少图像噪声。
高通滤波:边缘提取与增强
低通滤波:边缘平滑
边缘区域的灰度变换加大,也就是频率较高。所以,对于高通滤波,边缘部分将被保留,非边缘部分将被过滤;对于低通滤波,边缘区域将被平滑过渡。
一、边缘检测
直观上,边缘是一组相邻像素的集合,他们位于两个不同区域之间。而从根本上来说,边缘是基于某种算法得到的具有特定特征的点的集合。
灰度差分
由于边缘检测中的灰度微分通常利用邻域差分得到,为了方便表示,我们对邻域灰度微分运算的结果统一称为灰度差分。
1、常规边缘检测原理
边缘检测的算法通常通过对邻域内像素灰度求一阶导数、二阶倒数及梯度来实现,这些计算经过化简的结果成为算子。
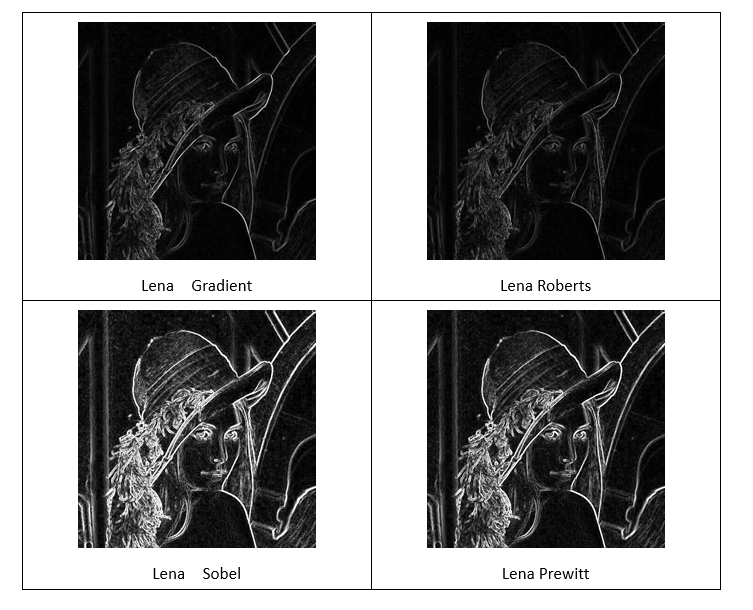
2、梯度算子(Gradient)
梯度算子是针对图像2X2邻域的处理,梯度算子通过对邻域内像素灰度求水平和垂直方向差分得到.
3、Roberts算子
同梯度算子一样都是针对图像2X2邻域的处理,Roberts算子是求对角线像素灰度的差分,因此Roberts算子也叫交叉差分算子。
Roberts算子特点是边缘定位准,对噪声敏感。
4、Prewitt算子:采用3x3模板
在边缘检测中,有时不希望对所有边缘都进行检测,而是只检测某种类型的边缘,这就需要对边缘进行筛选。例如只想找出源图像中水平方向的边缘或与水平方向成45度叫的边缘,这就是需要使用带方向的边缘检测。若把图像像素的灰度看做高度,可以把图像想象成一块高低不平的丘陵,其中灰度较高的像素在较高出,灰度低的像素在较低处,那么图像的边缘可看作丘陵中较陡的斜坡,而边缘的方向就是斜坡的方向。以45度为区间,可以把图像的边缘分为8个方向,使用带方向的边缘检测就是为了在检测中区分它们。
带方向的边缘检测同样需要检测对邻域内像素灰度求差分,与常规边缘检测不同的是,带方向的边缘检测不仅要考虑邻域像素的灰度跃变,还要考虑跃变的方向。常用的带方向边缘检测模板有3种,分别是Prewitt、Robinson、和Kirsch。
Prewitt算子:平均、微分对噪声有抑制作用。
5、Sobel算子
Sobe算子是针对图像3X3邻域的处理,它的原理是先后在水平方向和垂直方向上对邻域灰度求差分,然后取两个差分的平均值或其中较大者,通常我们使用两个差分的较大者。
Sobel算子在实际中最常用。
Sobel > Roberts > Gradient > Prewitt 以下为图像处理的结果
Lena 原图
6、Canny边缘检测——最优的阶梯型边缘检测算法
(1)基本原理
图像边缘检测必须满足两个条件:
一能有效地抑制噪声;
二必须尽量精确确定边缘的位置。
根据对信噪比与定位乘积进行测度,得到最优化逼近算子。这就是Canny边缘检测算子。
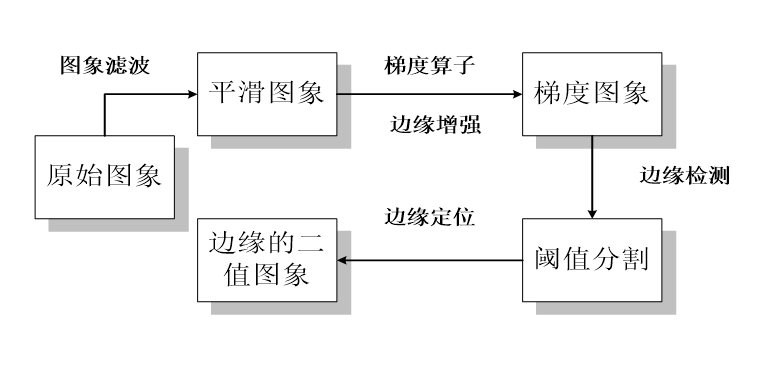
二、边缘检测算法的基本步骤
(1)滤波。边缘检测主要基于导数计算,但受噪声影响。但滤波器在降低噪声的同时也导致边缘强度的损失。
(2)增强。增强算法将邻域中灰度有显著变化的点突出显示。一般通过计算梯度幅值完成。
(3)检测。但在有些图像中梯度幅值较大的并不是边缘点。最简单的边缘检测是梯度幅值阈值判定。
(4)定位。精确确定边缘的位置。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
